





BU015X
中空構造の手首、上部アーム、ベース部にケーブルやホースが内蔵され、周辺機器との干渉の心配がありません。
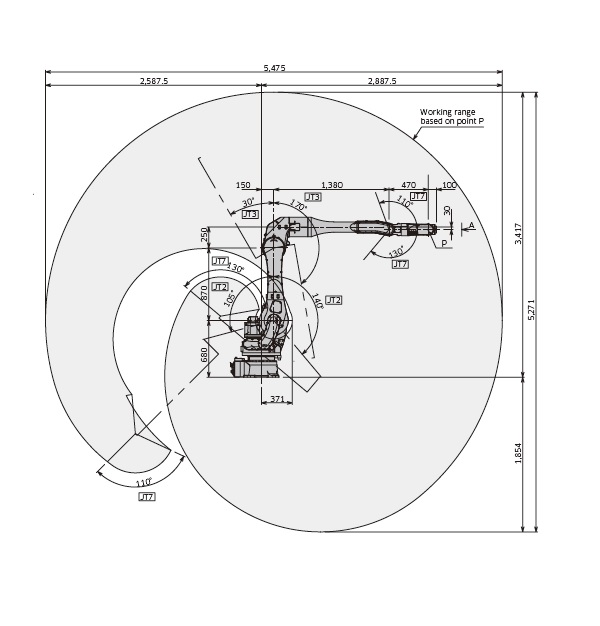
2,887.5mmの長いリーチを持ち、大きなワークのシーリングが可能です。
また、7軸仕様の手首部は折り曲げができるため、6軸仕様のロボットでは不可能な部位のシーリングにも適しています。
2,887.5mmの長いリーチを持ち、大きなワークのシーリングが可能です。
また、7軸仕様の手首部は折り曲げができるため、6軸仕様のロボットでは不可能な部位のシーリングにも適しています。
BU015X 概要:
最大可搬質量 15 kg
最大リーチ 2,887.5mm
用途:

動作範囲と寸法
下の図面をクリックして、ご覧ください。記載寸法はmm単位です。
BU015X 仕様
| BU015X | |||
| 型式 | 垂直多関節型 | ||
|---|---|---|---|
| 自由度(軸) | 7 | ||
| 最大可搬質量(kg) | 15 | ||
| 最大リーチ(mm) | 2,887.5 | ||
| 位置繰り返し精度(mm)※1 | ±0.06 | ||
| 動作範囲(°) |
腕旋回(JT1) | ±180 | |
| 腕前後(JT2) | +140 - –105 | ||
| 腕上下(JT3) | +30 - –170 | ||
| 手首回転(JT4) | ±210 | ||
| 手首曲げ1(JT7) | +110 - –130 | ||
| 手首曲げ2(JT5) | ±120 | ||
| 手首捻り(JT6) | ±360 | ||
| 最大速度(°/s) | 腕旋回(JT1) | 200 | |
| 腕前後(JT2) | 200 | ||
| 腕上下(JT3) | 200 | ||
| 手首回転(JT4) | 290 | ||
| 手首曲げ1(JT7) | 170 | ||
| 手首曲げ2(JT5) | 280 | ||
| 手首捻り(JT6) | 360 | ||
| 許容モーメント(N・m) | 手首回転(JT4) | - | |
| 手首曲げ(JT5) | 27.0 | ||
| 手首捻り(JT6) | 22.0 | ||
| 許容慣性モーメント(kg・㎡)※2 | 手首回転(JT4) | - | |
| 手首曲げ(JT5) | 0.70 | ||
| 手首捻り(JT6) | 0.25 | ||
| 本体質量(kg) | 590 | ||
| 設置方法 | 床置き | ||
| 設置環境 | 周囲温度(℃) | 0 - 45 | |
| 相対温度(%) | 35 - 85(但し、結露無きこと) | ||
| 対応コントローラ / 所要電源(kVA) | E52 / 10 | ||
| オプション | メカストッパJT1 | ||
| 走行装置 | |||
| 設置架台(600mmH、300mmH) | |||
| ベースプレート(750mm×750mm) | |||
| 上記以外については別途ご相談ください。 | |||
※1: ISO9283に準拠しています。
※2: この表の中の値は、手首各軸に許容される最大トルクが負荷された時、許容される負荷慣性モーメントを示します。
お問合せ

-
Click here



-
Share
-

-

-

-

-
