





KJ264 Wall Robot
EXPLOSION-PROOF PAINTING ROBOT
The wall mounting KJ264 explosion-proof painting robot features a 3R (Roll, Roll, Roll) hollow wrist with inner diameter of 70 mm to accommodate hoses as well as a slim and lighweight body with a wide motion range. Painting equipment can be mounted on the upper arm.
KJ264 Wall Overview:
Payload wrist 15 kg,
arm 25 kg
Max.Reach 2,640 mm
Applications:
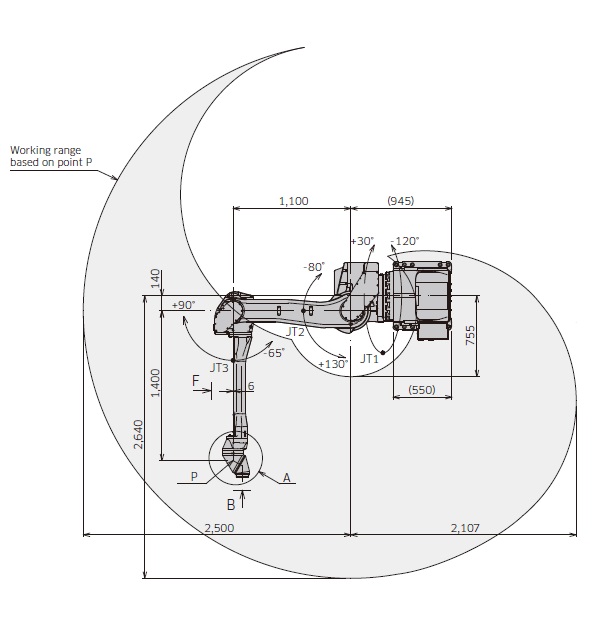
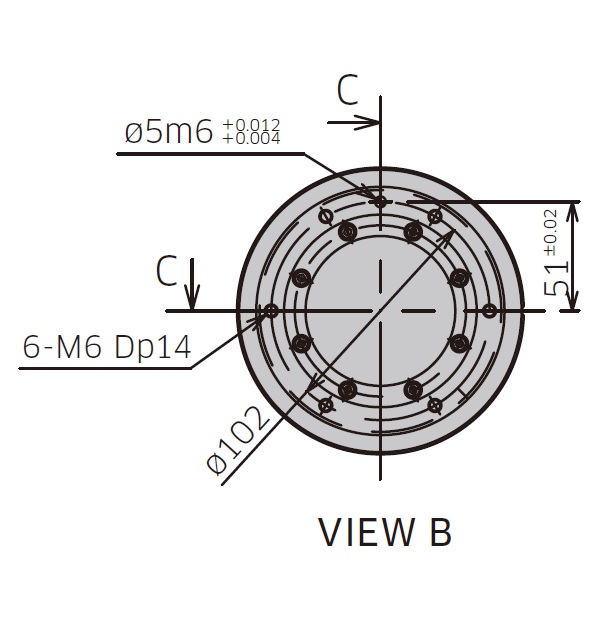
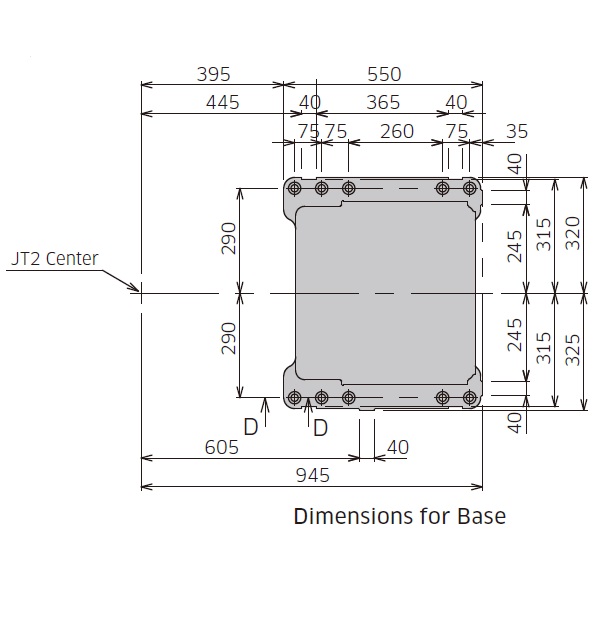
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).
KJ264 Wall SPECIFICATIONS
| KJ264 Wall SPECIFICATIONS | |||
| Wrist Type | 3Rø70 ✽1 | ||
|---|---|---|---|
| Degrees of Freedom (axes) | 6 | ||
| Payload (kg) | Wrist:15 Arm:25 | ||
| Max. Reach (mm) ✽2 | 2,640 | ||
| Positional Repeatability (mm) ✽3 | ±0.5 | ||
| Motion Range (°) | Arm Rotation (JT1) | +30 - −120 ✽4 | |
| Arm Out-in (JT2) | +130 - −80 | ||
| Arm Up-down (JT3) | +90 - −65 | ||
| Wrist Swivel (JT4) | ±720 | ||
| Wrist Bend (JT5) | ±720 | ||
| Wrist Twist (JT6) | ±410 | ||
| Allowable Moment (N•m) | Wrist Swivel (JT4) | 56.2 | |
| Wrist Bend (JT5) | 43.4 | ||
| Wrist Twist (JT6) | 22.0 | ||
| Allowable Moment of Inertia (kg•m2) | Wrist Swivel (JT4) | 2.19 | |
| Wrist Bend (JT5) | 1.31 | ||
| Wrist Twist (JT6) | 0.33 | ||
| Mass (kg) | 530 | ||
| Mounting | Wall | ||
| Installation Environment | Ambient Temperature (°C) | 0 - 40 | |
| Relative Humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Power Requirements (kVA) ✽5 | 5 | ||
| Explosion-proof Construction | America | Combination of pressurized type and intrinsically safety type (CL I ZN 1 AEx ib pxb ⅡB T4 / AEx ib IIB T4 Gb) | |
| Canada | Combination of pressurized type and intrinsically safety type (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4 Gb) | ||
| Europe | Combination of pressurized type and intrinsically safety type (Ⅱ2 G Ex pxb ib ⅡB T4 / Ex ib IIB T4 Gb) | ||
| Korea | Combination of pressurized type and intrinsically safety type (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4) | ||
| China | Combination of pressurized type and intrinsically safety type (Ex ib px ⅡB T4 Gb / Ex ib IIB T4 Gb) | ||
| Japan & Asia (except Korea and China) | Combination of pressurized type and intrinsically safety type (fG4 / Ex ib IIB T4 Gb) | ||
| Controller | America | E35 | |
| Europe | E45 | ||
| Japan & Asia | E25 | ||
| Painting Speed (m/s) | 1.5 | ||
✽1: Hose Built-in.
✽2: The 3R (Roll Roll Roll) wrist of the 6-axis robots is the distance from the center of JT1 to the intersection of JT4 and JT5 axes.
✽3: The figure conforms to ISO9283.
✽4: Operating range of JT1 is depend on the side of mounting surface. The range is "+120 - −30" in the case of the left side. The range is "+30 - −120" in the case of the right side.
✽5: Depends on payload and motion patterns.
Contact

-
Click here or call +49 2131 3426-0
(Mon.-Fri. 9:00-17:00 CET)
Share




