





CX210L Robot
NEW GENERAL-PURPOSE LARGE PAYLOAD ROBOT
The CX210L robot has a payload capacity of 210 kg, the highest of the general-purpose CX series robots. The CX robots offer a large payload capacity and feature a robust, yet lightweight, hollow arm and a new smaller sized universal controller. The series high-speed and slim arm design was developed to suit a wide range of applications, from material handling to spot welding.
CX210L Overview:
Payload 210 kg
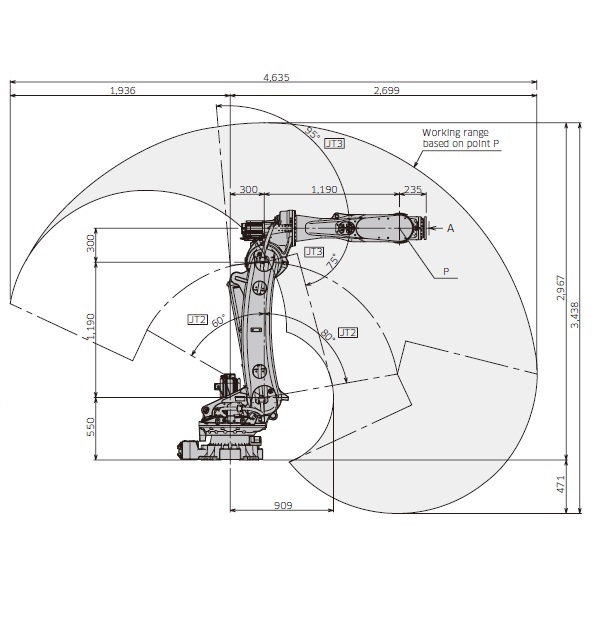
Max.Reach 2,699 mm
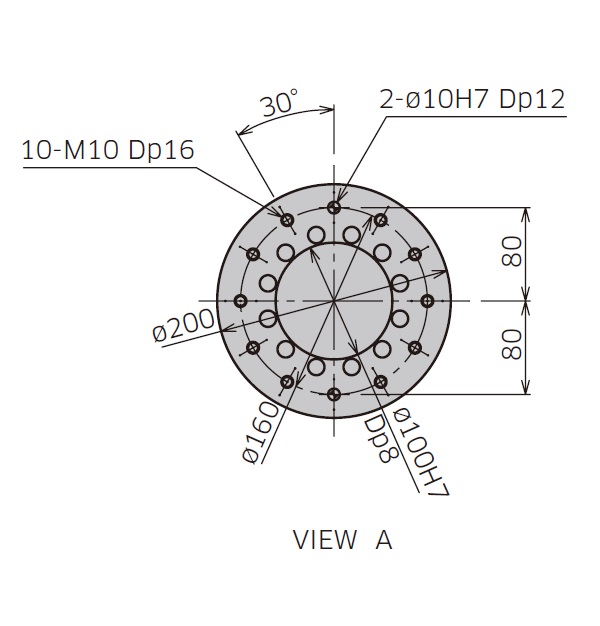
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).

CX210L SPECIFICATIONS
| CX210L SPECIFICATIONS | |||
| Type | Articulated Robot | ||
|---|---|---|---|
| Degrees of Freedom (axes) | 6 | ||
| Payload (kg) | 210 | ||
| Max. Reach (mm) | 2,699 | ||
| Positional Repeatability (mm) ✽1 | ±0.06 | ||
| Motion Range (°) | Arm Rotation (JT1) | ±160 | |
| Arm Out-in (JT2) | +80 - −60 | ||
| Arm Up-down (JT3) | +95 - −75 | ||
| Wrist Swivel (JT4) | ±210 | ||
| Wrist Bend (JT5) | ±120 | ||
| Wrist Twist (JT6) | ±360 | ||
| Max. Speed (°/s) | Arm Rotation (JT1) | 125 | |
| Arm Out-in (JT2) | 115 | ||
| Arm Up-down (JT3) | 115 | ||
| Wrist Swivel (JT4) | 155 | ||
| Wrist Bend (JT5) | 160 | ||
| Wrist Twist (JT6) | 220 | ||
| Allowable Moment (N•m) | Wrist Swivel (JT4) | 1,370 | |
| Wrist Bend (JT5) | 1,370 | ||
| Wrist Twist (JT6) | 700 | ||
| Allowable Moment of Inertia (kg•m2) | Wrist Swivel (JT4) | 199.8 | |
| Wrist Bend (JT5) | 199.8 | ||
| Wrist Twist (JT6) | 154.9 | ||
| Mass (kg) | 870 | ||
| Mounting | Floor | ||
| Installation Environment | Ambient Temperature (°C) | 0 - 45 | |
| Relative Humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Controller / Power Requirements (kVA) | America | E02 / 7.5 | |
| Europe | E02 / 7.5 |
||
| Japan&Asia | E02 / 7.5 | ||
✽1: The figure conforms to ISO9283.
Contact

-
Click here or call +49 2131 3426-0
(Mon.-Fri. 9:00-17:00 CET)
Share




