





BX100S Robot
OPTIMIZED SPOT WELDING ROBOT
The smallest and fastest of the B series, the BX100S robot features a hollow wrist for housing cables and hoses. Its short reach design is suitable for small and light weld guns, and it allows the robot to be installed close to the workpiece and in high-density applications.
BX100S Robot Overview:
Payload 100 kg
Max.Reach 1,634 mm

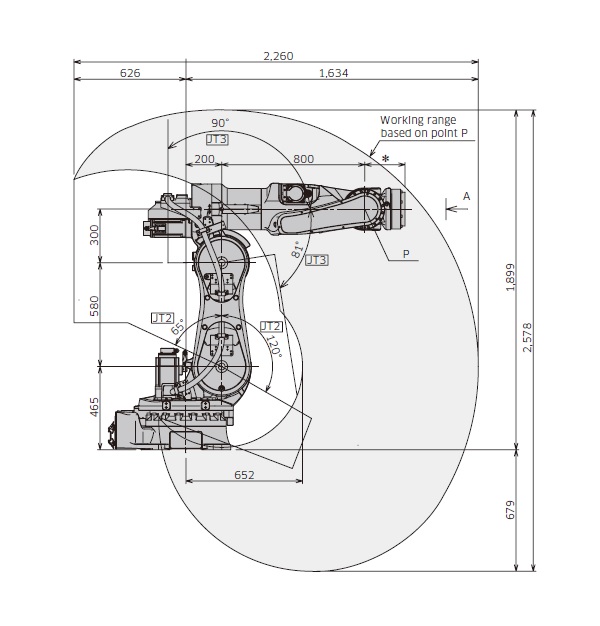
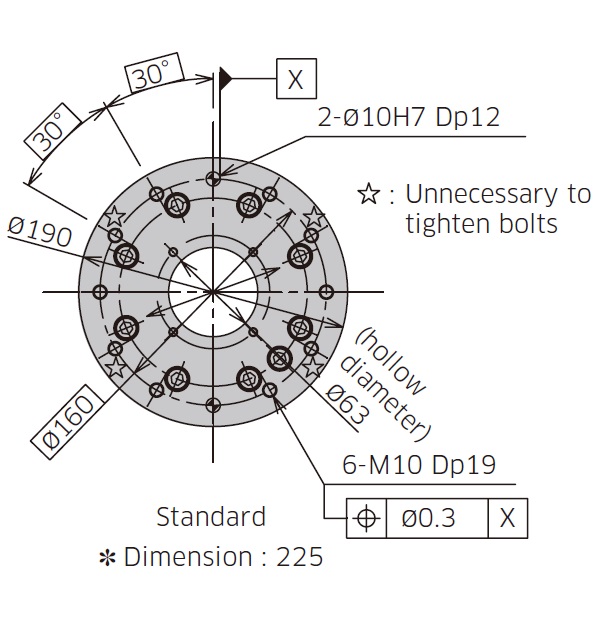
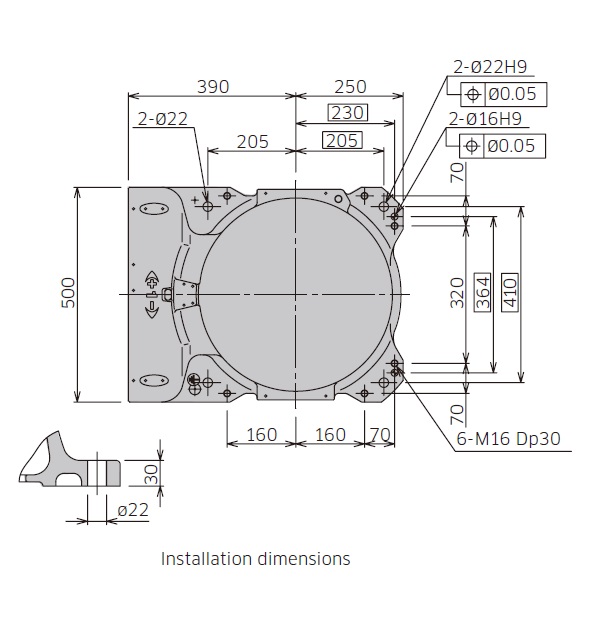
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).
BX100S Robot SPECIFICATIONS
| BX100S SPECIFICATIONS | |||
| Type | Articulated Robot | ||
|---|---|---|---|
| Degrees of Freedom (axes) | 6 | ||
| Payload (kg) | 100 | ||
| Max. Reach (mm) | 1,634 | ||
| Positional Repeatability (mm) ✽1 | ±0.06 | ||
| Motion Range (°) | Arm Rotation (JT1) | ±160 | |
| Arm Out-in (JT2) | +120 - −65 | ||
| Arm Up-down (JT3) | +90 - −81 | ||
| Wrist Swivel (JT4) | ±210 | ||
| Wrist Bend (JT5) | ±125 | ||
| Wrist Twist (JT6) | ±210 | ||
| Max. Speed (°/s) | Arm Rotation (JT1) | 135 | |
| Arm Out-in (JT2) | 125 | ||
| Arm Up-down (JT3) | 155 | ||
| Wrist Swivel (JT4) | 200 | ||
| Wrist Bend (JT5) | 160 | ||
| Wrist Twist (JT6) | 300 | ||
| Allowable Moment (N•m) | Wrist Swivel (JT4) | 830 | |
| Wrist Bend (JT5) | 830 | ||
| Wrist Twist (JT6) | 441 | ||
| Allowable Moment of Inertia (kg•m2) | Wrist Swivel (JT4) | 85 | |
| Wrist Bend (JT5) | 85 | ||
| Wrist Twist (JT6) | 45 | ||
| Mass (kg) | 720 | ||
| Mounting | Floor | ||
| Installation Environment | Ambient Temperature (°C) | 0 - 45 | |
| Relative Humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Controller / Power Requirements (kVA) | America | E02 / 7.5 | |
| Europe | E02 / 7.5 |
||
| Japan & Asia | E02 / 7.5 | ||
| Protection | Wrist : IP67 equivalent / Base axis : IP54 equivalent | ||
✽1: The figure conforms to ISO9283.
Contact

-
Click here or call +49 2131 3426-0
(Mon.-Fri. 9:00-17:00 CET)
Share




