





RS005N Robot
HIGH-SPEED, HIGH-PERFORMANCE ROBOT
The R series Robots are setting the benchmark for all small to medium duty industrial robots. The compact design, along with industry leading speed, reach and work range make the R series Robots ideal for a wide range of applications throughout a multitude of diverse industries.
RS005N Overview:
Payload 5 kg
Max.Reach 705 mm

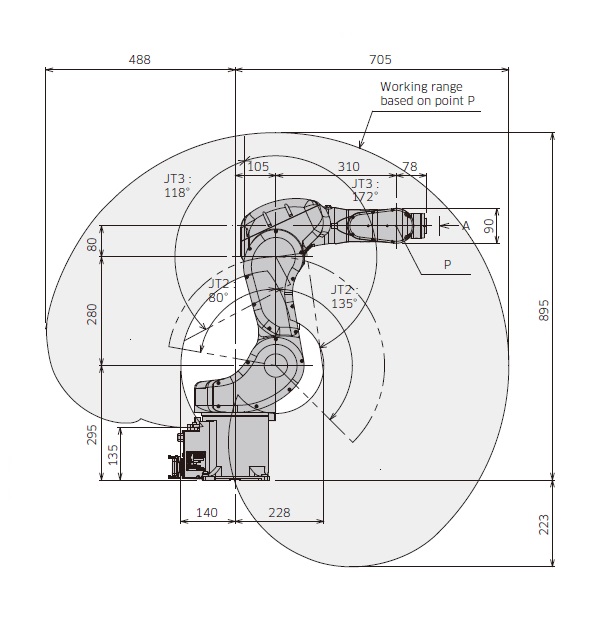
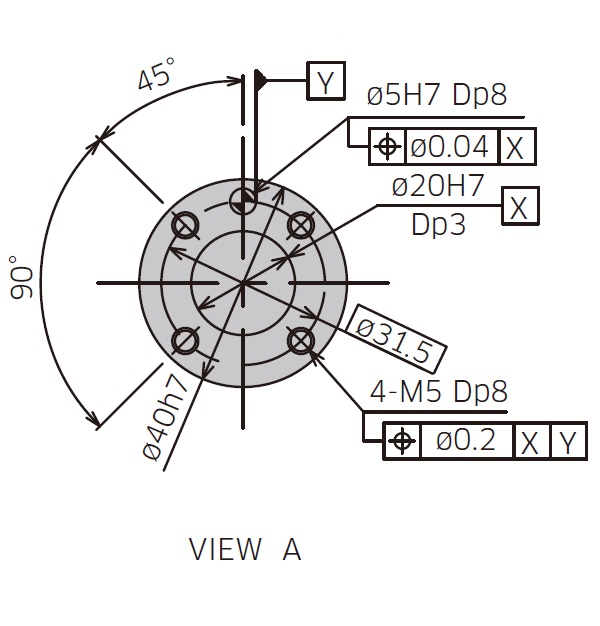
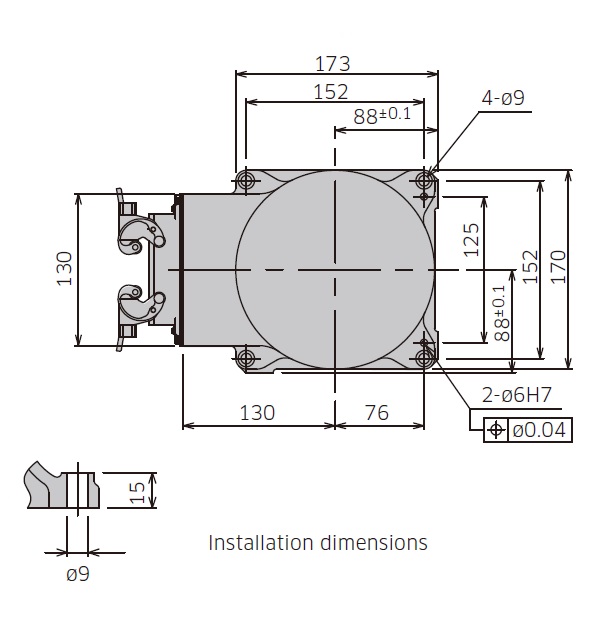
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).
RS005N SPECIFICATIONS
| RS005N SPECIFICATIONS | |||
| Type | Articulated Robot | ||
|---|---|---|---|
| Degrees of Freedom (axes) | 6 | ||
| Payload (kg) | 5 | ||
| Max. Reach (mm) | 705 | ||
| Positional Repeatability (mm) ✽1 | ±0.02 | ||
| Motion Range (°) | Arm Rotation (JT1) | ±180 | |
| Arm Out-in (JT2) | +135 - −80 | ||
| Arm Up-down (JT3) | +118 - −172 | ||
| Wrist Swivel (JT4) | ±360 | ||
| Wrist Bend (JT5) | ±145 | ||
| Wrist Twist (JT6) | ±360 | ||
| Max. Speed (°/s) | Arm Rotation (JT1) | 360 | |
| Arm Out-in (JT2) | 360 | ||
| Arm Up-down (JT3) | 410 | ||
| Wrist Swivel (JT4) | 460 | ||
| Wrist Bend (JT5) | 460 | ||
| Wrist Twist (JT6) | 740 | ||
| Allowable Moment (N•m) | Wrist Swivel (JT4) | 12.3 | |
| Wrist Bend (JT5) | 12.3 | ||
| Wrist Twist (JT6) | 7 | ||
| Allowable Moment of Inertia (kg•m2) | Wrist Swivel (JT4) | 0.4 | |
| Wrist Bend (JT5) | 0.4 | ||
| Wrist Twist (JT6) | 0.12 | ||
| Mass (kg) | 34 | ||
| Mounting | Floor, Ceiling | ||
| Installation Environment | Ambient Temperature (°C) | 0 - 45 | |
| Relative Humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Controller / Power Requirements (kVA) | F60 / 2.0 | ||
| Protection | Wrist : IP67 Base axis : IP65 | ||
✽1: The figure conforms to ISO9283.
Contact

-
Click here





