





test BA006L Robot
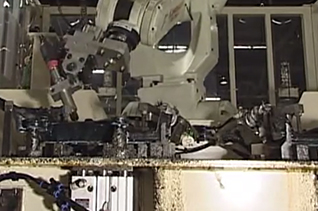
THROUGH-ARM CABLE ARC WELDING ROBOT
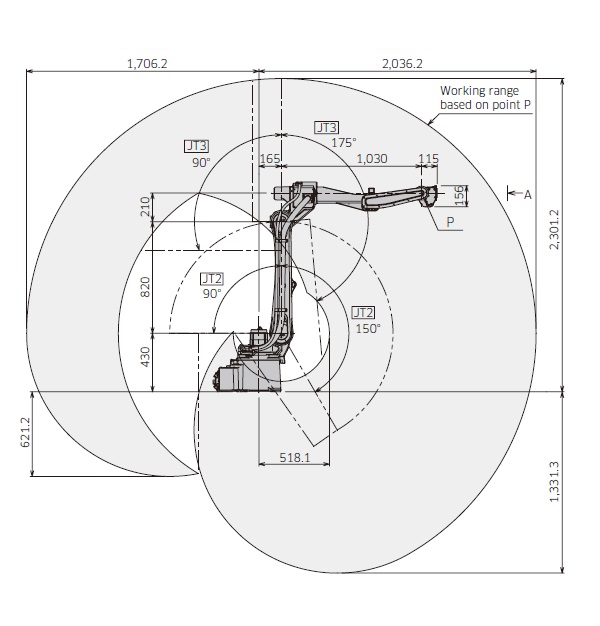
The BA006L arc welding robot has a maximum reach of 2,036 mm and a hollow wrist structure that allows for easy management of cables and hoses around the torch, providing stable wire feeding and reliable offline teaching.
BA006L Overview:
Payload 6 kg
Max. Reach 2,036 mm
Applications:

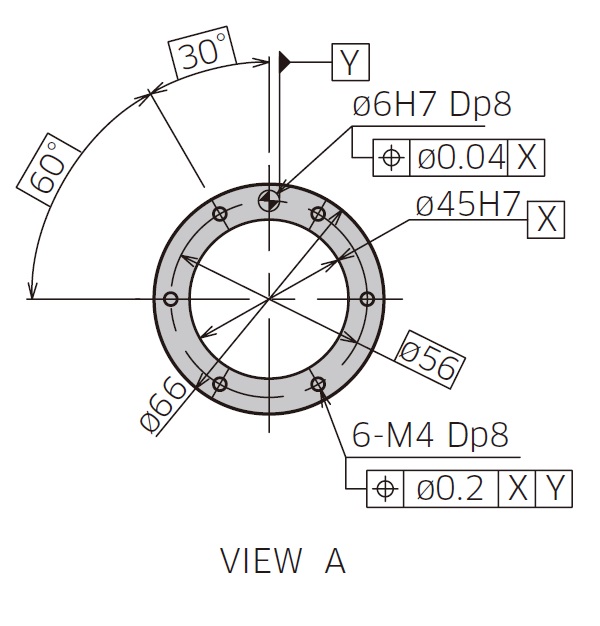
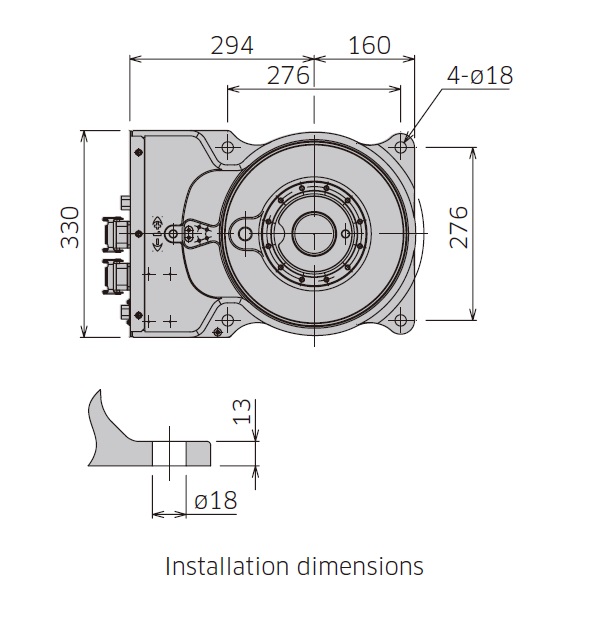
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).
BA006L SPECIFICATIONS
| BA006L SPECIFICATIONS | |||
| Type | Articulated Robot | ||
|---|---|---|---|
| Degrees of Freedom | 6 | ||
| Payload (kg) | 6 | ||
| Max. Reach (mm) | 2,036 | ||
| Positional Repeatability (mm) ✽1 | ±0.08 | ||
| Motion Range (°) | Arm Rotation (JT1) | ±165 | |
| Arm Out-in (JT2) | +150 - −90 | ||
| Arm Up-down (JT3) | +90 - −175 | ||
| Wrist Swivel (JT4) | ±180 | ||
| Wrist Bend (JT5) | ±135 | ||
| Wrist Twist (JT6) | ±360 | ||
| Max. Speed (°/s) | Arm Rotation (JT1) | 210 | |
| Arm Out-in (JT2) | 210 | ||
| Arm Up-down (JT3) | 220 | ||
| Wrist Swivel (JT4) | 430 | ||
| Wrist Bend (JT5) | 430 | ||
| Wrist Twist (JT6) | 650 | ||
| Allowable Moment (N•m) | Wrist Swivel (JT4) | 12 | |
| Wrist Bend (JT5) | 12 | ||
| Wrist Twist (JT6) | 3.75 | ||
| Allowable Moment of Inertia (kg•m2) | Wrist Swivel (JT4) | 0.4 | |
| Wrist Bend (JT5) | 0.4 | ||
| Wrist Twist (JT6) | 0.07 | ||
| Mass (kg) | 160 | ||
| Mounting | Floor, Ceiling | ||
| Installation Environment | Ambient Temperature (°C) | 0 - 45 | |
| Relative Humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Controller / Power Requirements (kVA) | America | E01 / 5.6 | |
| Europe | |||
| Japan & Asia | |||
✽1: The figure conforms to ISO9283.
Contact

-
Click here





