BA006N
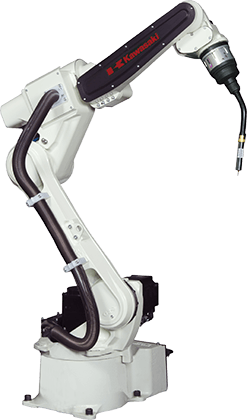
Through-Arm Cable Arc Welding Robot
The BA006N arc welding robot has a maximum reach of 1,445 mm and a hollow wrist structure that allows for easy management of cables and hoses around the torch, providing stable wire feeding and reliable offline teaching. Improve product quality while addressing labor shortages with this high-performance robot.
Application Video
Car Body Assembly at iREX2015 - Kawasaki CX210L, BX300L, BX100S & BA006N robots
※ Before using CAD data, please be sure to read disclaimer here.