





MS005N Robot
MEDICAL & PHARMACEUTICAL ROBOT
The MS005N clean robot helps prevent human errors, contamination risks, and exposure to High Potency Pharmaceutical Ingredients, such as anticancer drugs. The robot meets the healthcare industry’s processing equipment specifications for accuracy, consistency and cleanliness, making it ideal for assembly, dispensing, inspection and material handling applications. The robot arm is made of all stainless steel with flat and smooth surfaces to allow for VHP (Vaporized Hydrogen Peroxide) sterilisation.
MS005N Robot Overview:
Payload
5 kg
Max.Reach
660 mm
Repeatability
±0.1 mm
Applications:
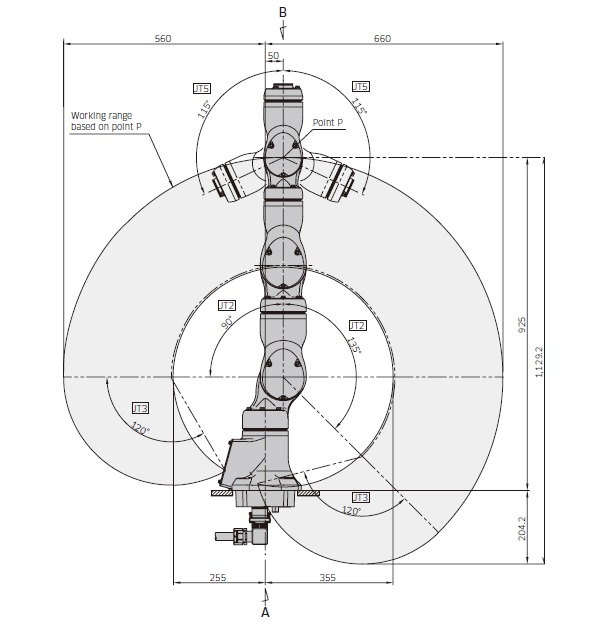
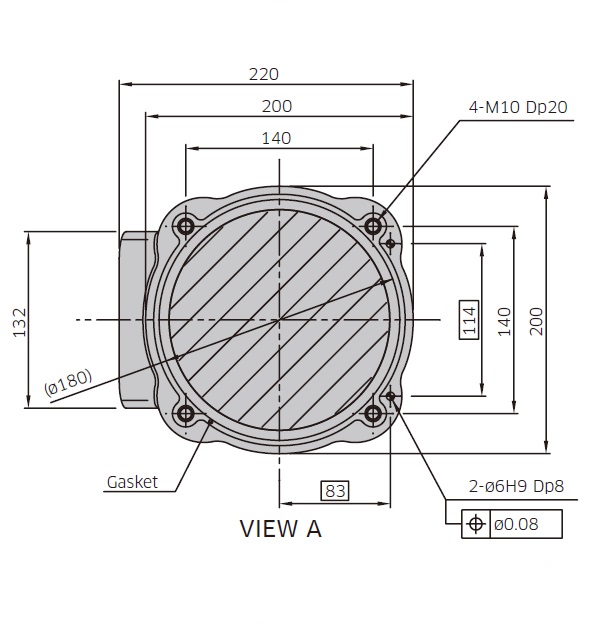
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).

MS005N Robot SPECIFICATIONS
| MS005N SPECIFICATIONS | |||
| Type | Articulated Robot | ||
|---|---|---|---|
| Degrees of Freedom(axes) | 7 | ||
| Payload (kg) | 5 | ||
| Max. Reach (mm) | 660 | ||
| Positional Repeatability (mm) ✽1 | ±0.1 | ||
| Motion Range (°) | Arm Rotation (JT1) | ±180 | |
| Arm Out-in (JT2) | +135 - −90 | ||
| Arm Up-down (JT3) | ±120 | ||
| Wrist Swivel (JT4) | ±180 | ||
| Wrist Bend (JT5) | ±115 | ||
| Wrist Twist (JT6) | ±180 | ||
| Wrist Twist (JT7) | ±180 | ||
| Max. Speed (°/s) | Arm Rotation (JT1) | 130 | |
| Arm Out-in (JT2) | 130 | ||
| Arm Up-down (JT3) | 215 | ||
| Wrist Swivel (JT4) | 300 | ||
| Wrist Bend (JT5) | 300 | ||
| Wrist Twist (JT6) | 480 | ||
| Wrist Twist (JT7) | 215 | ||
| Allowable Moment (N•m) | Wrist Swivel (JT4) | 17.0 | |
| Wrist Bend (JT5) | 17.0 | ||
| Wrist Twist (JT6) | 7.0 | ||
| Allowable Moment of Inertia (kg•m2) | Wrist Swivel (JT4) | 0.90 | |
| Wrist Bend (JT5) | 0.90 | ||
| Wrist Twist (JT6) | 0.40 | ||
| Mass (kg) | 50 | ||
| Mounting | Floor, Ceiling | ||
| Installation Environment | Ambient Temperature (°C) | 10 - 35 | |
| Relative Humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Controller / Power Requirements (kVA) | F60 / 2.0 | ||
| Protection✽2 | Wrist : IP69 | ||
| Cleanliness | ISO Class5 | ||
✽1: The figure conforms to ISO9283.
✽2: The flange must be closed in case of using the built-in piping.
Contact

-
Click here





