





MX350L Robot
INNOVATIVE HIGH WRIST TORQUE ROBOT
The MX350L robot has a maximum payload capacity of 350 kg and reach of 3,018 mm with one of the highest available wrist torque in the industry, which provides the ability to significantly offset heavy payloads from the tool mounting flange. Along with powerful motors, Kawasaki's original link design for JT3 (arm up-down) gives the robot the power to lift heavy loads without the use of bulky and limiting counterweights, maximizing the robot’s motion range and allowing for a compact footprint.
MX350L Overview:
Payload 350 kg
Max.Reach 3,018 mm
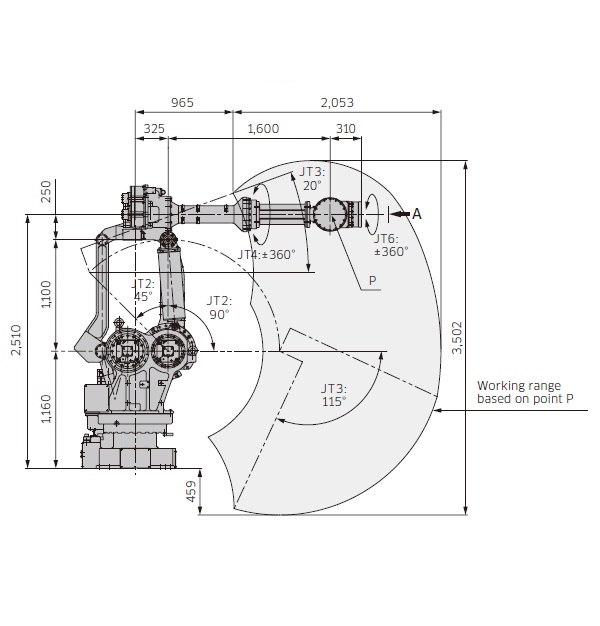
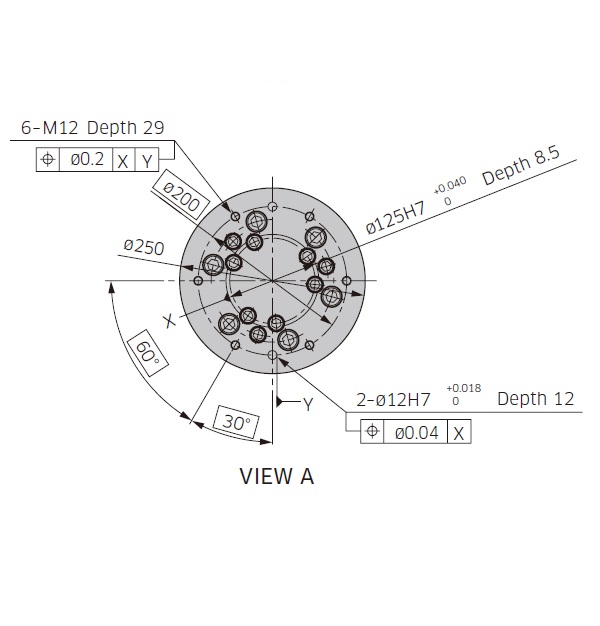
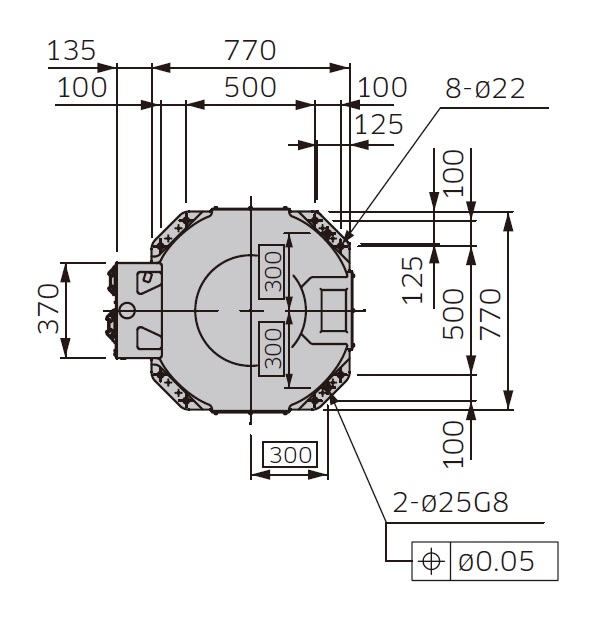
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).
MX350L SPECIFICATIONS
| MX350L SPECIFICATIONS | |||
| Type | Articulated Robot | ||
|---|---|---|---|
| Degrees of Freedom (axes) | 6 | ||
| Payload (kg) | 350 | ||
| Max. Reach (mm) | 3,018 | ||
| Positional Repeatability (mm) ✽1 | ±0.1 | ||
| Motion Range (°) | Arm Rotation (JT1) | ±180 | |
| Arm Out-in (JT2) | +90 - −45 | ||
| Arm Up-down (JT3) | +20 - −115 | ||
| Wrist Swivel (JT4) | ±360 | ||
| Wrist Bend (JT5) | ±110 | ||
| Wrist Twist (JT6) | ±360 | ||
| Max. Speed (°/s) | Arm Rotation (JT1) | 80 | |
| Arm Out-in (JT2) | 70 | ||
| Arm Up-down (JT3) | 70 | ||
| Wrist Swivel (JT4) | 80 | ||
| Wrist Bend (JT5) | 80 | ||
| Wrist Twist (JT6) | 120 | ||
| Allowable Moment (N•m) | Wrist Swivel (JT4) | 2,740 | |
| Wrist Bend (JT5) | 2,740 | ||
| Wrist Twist (JT6) | 1,960 | ||
| Allowable Moment of Inertia (kg•m2) | Wrist Swivel (JT4) | 400 | |
| Wrist Bend (JT5) | 400 | ||
| Wrist Twist (JT6) | 250 | ||
| Mass (kg) | 2,800 | ||
| Mounting | Floor | ||
| Installation Environment | Ambient Temperature (°C) | 0 - 45 | |
| Relative Humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Controller / Power Requirements (kVA) | E04 / 12 | ||
✽1: It conforms to ISO9283.
Contact

-
Click here





