





ZX130U Roboter
DIE FLEXIBLEN SCHWERLASTROBOTER
Die Schwerlastroboter der Z Serie wurden mithilfe Kawasakis fortschrittlicher Technologie und umfangreicher Erfahrung in der Automatisierung entwickelt. Die robusten und wartungsarmen Designs sind direkt ausschlaggebend für die verbesserte Effizienz von Fertigungsanlagen im Fahrzeugbau und bei allgemeinen Industrieanwendungen.
ZX130U Übersicht:
Maximale Nutzlast 130 kg
Maximale Reichweite 2651 mm

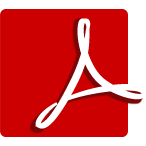
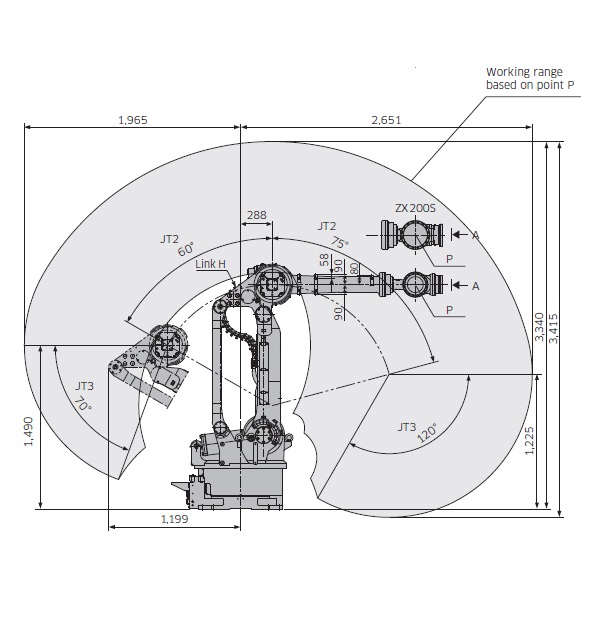
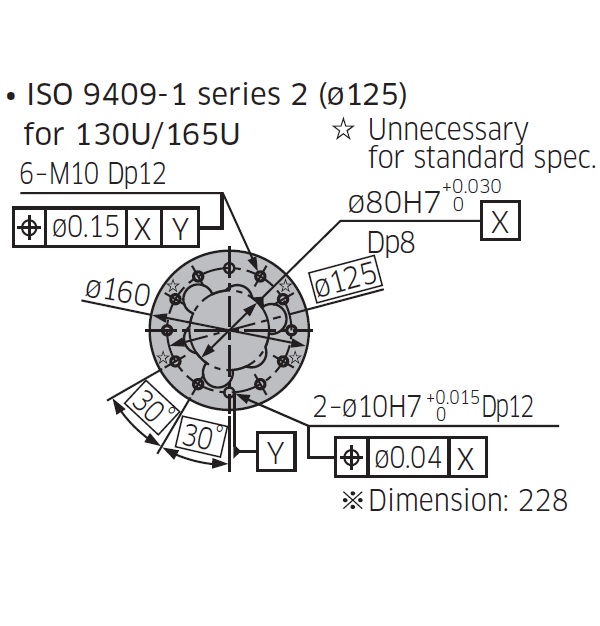
BEWEGUNGSRADIUS & ABMESSUNGEN
Klicken Sie zur Ansicht auf die Zeichnungen unten. Angegebene Maße sind in mm.
ZX130U SPEZIFIKATIONEN
| ZX130U SPEZIFIKATIONEN | |||
| Typ | Gelenkarmroboter | ||
|---|---|---|---|
| Freiheitsgrade | 6 | ||
| Maximale Nutzlast (kg) | 130 | ||
| Maximale Reichweite (mm) | 2651 | ||
| Positionswiederholgenauigkeit(mm) ✽1 | ±0,3 | ||
| Bewegungsbereich (°) | Arm Rotation (JT1) | ±180 | |
| Arm Raus-rein (JT2) | +75 - −60 | ||
| Arm Auf-ab (JT3) | +250 - −120 | ||
| Handgelenk Schwenken (JT4) | ±360 | ||
| Handgelenk Biegen (JT5) | ±130 | ||
| Handgelenk Drehen (JT6) | ±360 | ||
| Maximale Geschwindigkeit (°/s) | Arm Rotation (JT1) | 110 | |
| Arm Raus-rein (JT2) | 110 | ||
| Arm Auf-ab (JT3) | 110 | ||
| Handgelenk Schwenken (JT4) | 140 | ||
| Handgelenk Biegen (JT5) | 135 | ||
| Handgelenk Drehen (JT6) | 230 | ||
| Zulässiges Drehmoment (N•m) ✽2 | Handgelenk Schwenken (JT4) | 735,0 | |
| Handgelenk Biegen (JT5) | 735,0 | ||
| Handgelenk Drehen (JT6) | 421,4 | ||
| Zulässiges Trägheitsmoment (kg•m2) ✽2 | Handgelenk Schwenken (JT4) | 107,8 | |
| Handgelenk Biegen (JT5) | 107,8 | ||
| Handgelenk Drehen (JT6) | 45,9 | ||
| Gewicht (kg) | 1350 | ||
| Installation | Boden | ||
| Umgebungsbedingungen | Umgebungstemperatur (°C) | 0 - 45 | |
| Relative Luftfeuchtigkeit (%) | 35 - 85 (nicht geschützt gegen Tauwasser und Frost) | ||
| Controller / Strombedarf (kVA) | E02 / 7.5 | ||
✽1: Die Abbildung entspricht ISO9283.
✽2: Bei Verwendung der Planscheibe, die durch geeignete Schrauben und Bolzen gehalten wird.
Kontakt

-
Klicken Sie hier oder rufen Sie
+49 2131 3426-0 an(Mo. – Fr. 9:00 - 17:00 MEZ)
Teilen




