





시뮬레이션/오프라인 프로그래밍
로봇 교시 시간을 단축 하면 코스트를 큰 폭으로 줄일 수 있습니다. 가와사키는 「KCONG」와「K-ROSET」두 개의 옵션을 제공합니다.
「KCONG」는 고난이도의 자동교시나 커스터마이즈가 필요한 경우에 추천하는 본격 툴입니다.
한편, 「K-ROSET」는 실용적인 툴로서 보다 쓰기 쉽고 저렴한 가격에 제공하는 소프트웨어입니다.
「KCONG」는 고난이도의 자동교시나 커스터마이즈가 필요한 경우에 추천하는 본격 툴입니다.
한편, 「K-ROSET」는 실용적인 툴로서 보다 쓰기 쉽고 저렴한 가격에 제공하는 소프트웨어입니다.

로봇 시뮬레이션 소프트웨어 K-ROSET
특징
- 1.가상 로봇 시뮬레이션 기술 / 정확한 동작 궤적, 택타임 / 가공 결과 표시
- K-ROSET은 가와사키가 오랜 세월 쌓아온 가상 로봇 콘트롤러 기술로써 실제의 생산라인에서 가동중인 로봇 콘트롤러와 거의 동등한 동작을 실시할 수 있습니다.
가상 로봇 콘트롤러상에서 동작 하고 있기 때문에, 매우 정확한 동작 궤적, 택타임이 K-ROSET상에서 재현될 수 있습니다.
K-ROSET에 작성한 교시 프로그램은 실제기기에서 그대로 이용할 수 있으며, 반대로도 가능합니다. AS 언어가 PC상에서 정확하게 실행되기 때문에, 현장의 조정 시간을 줄일 수 있습니다.
용접, 도장 명령을 실행해 가공된 결과를 에어컷 동작과 구별해 궤적 표시 할 수 있습니다. - 2.간섭 체크, 레이아웃 검증, 다수 로봇의 동작 확인
- 설비 가동시에 생산 설비가 간섭하지 않는지 PC상에서 사전에 확인할 수 있습니다. 사전에 레이아웃을 검증하여 고객의 생산기기를 간섭의 데미지로부터 구할 수 있습니다.
다른 콘트롤러, 다른 적용의 로봇 다수를 동시에 시뮬레이션 할 수 있습니다. - 3.로봇 시스템의 생산성 향상
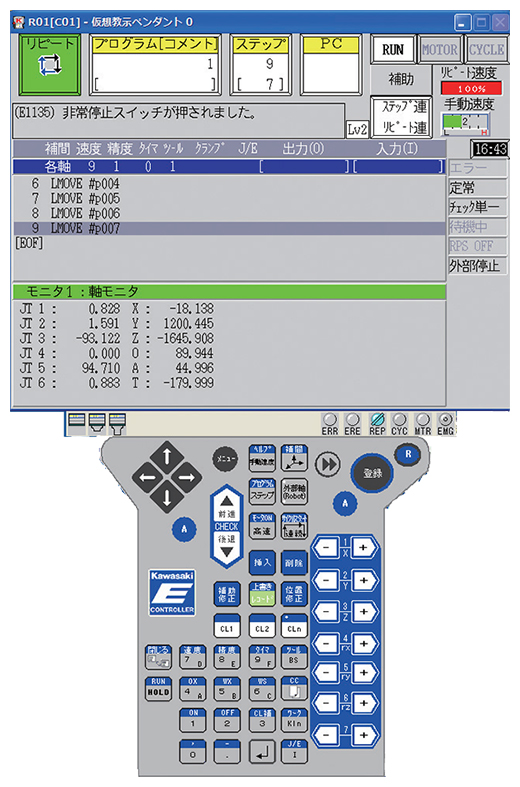
- PC상에서 가상 교시 펜던트가 표시되어 조작할 수 있습니다.
트레이닝이나 교시 작업으로 라인 생산의 최적화를 생산에 방해하지 않고 실시할 수 있습니다. - 4.애니메이션 작성
- 시뮬레이션중인 모델 동영상을 애니메이션 파일에 저장할 수 있습니다. 프레젠테이션 자료 작성에 활용할 수 있습니다.
- 5.확장 주변축 시스템에 대응
- 로봇 콘트롤러에서 제어하는 외부축을 자유롭게 커스터마이즈 하여 시뮬레이션 할 수 있습니다.
- 6.CAD 데이터 임포트
- STL 형식을 서포트 합니다. 사용중인 CAD로 STL 출력한 데이터를 K-ROSET에 넣을 수 있습니다. IGES 형식의 변환 옵션이 있습니다.

오프라인 프로그래밍 소프트웨어 - KCONG
특징
- 1.간단조작
- 로봇에 관한 지식이 없는 사람이라도 화면을 보면서 간단하고 스피디 하게 로봇의 동작 데이터를 작성할 수 있습니다.
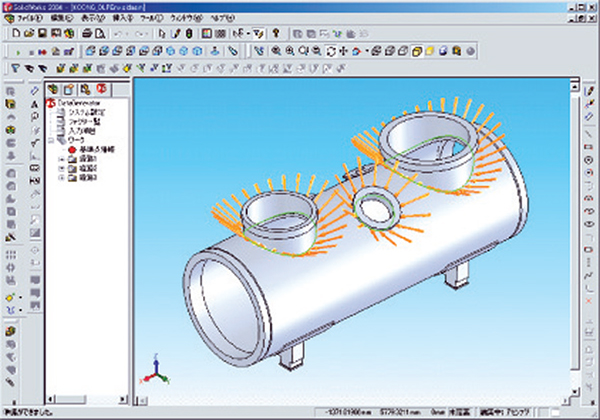
- 2.설계에서 생산까지의 심리스 환경
- 3D CAD 데이터를 그대로 사용하여 로봇의 동작 데이터(CAM 데이터)를 자동생성 하기 위한 설계에서 생산 현장까지의 심리스 흐름을 구축할 수 있습니다.
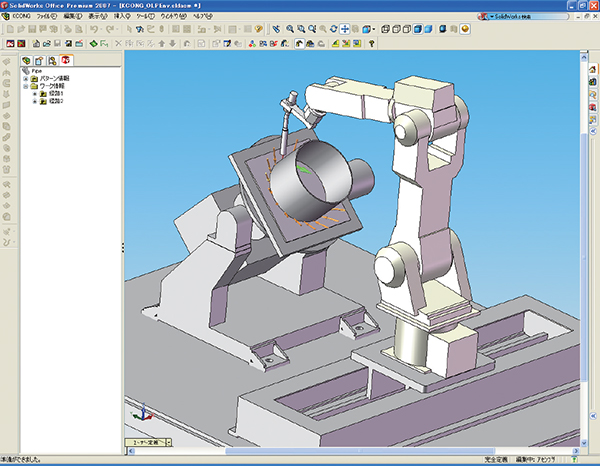
- 3.사전 검증
- 로봇 시뮬레이터를 이용해 현장 작업을 시뮬레이트 하는 것으로써, 간섭 등의 검증과 조정이 용이합니다.
- 4.높은 확장성
- 다양한 현장의 요구와 작업 내용에 대응한 최적의 어플리케이션・패키지를 통하여 고객마다 자유롭게 시스템을 확장할 수 있습니다.

공유





