




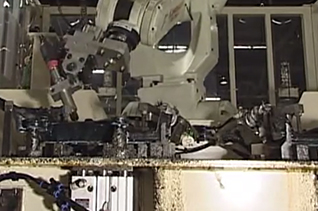

KJ264 Wandroboter
EXPLOSIONSSICHERE LACKIERROBOTER
Die Lackierroboter der K Serie verbinden eine hohe Laufleistung mit leistungsstarker Programmierflexibilität. Mit sechs explosionssicheren Modellen hat Kawasaki passende Roboter für jede robotergesteuerte Lackieranwendung, von der Lackierzelle mit Einzelroboter bis hin zu ganzheitlichen Multi-Roboter-Lackiersystemen.
KJ264 Wand Übersicht:
Maximale Nutzlast Hand 15kg, Arm 25kg
Maximale Reichweite 2640 mm
Anwendungen:
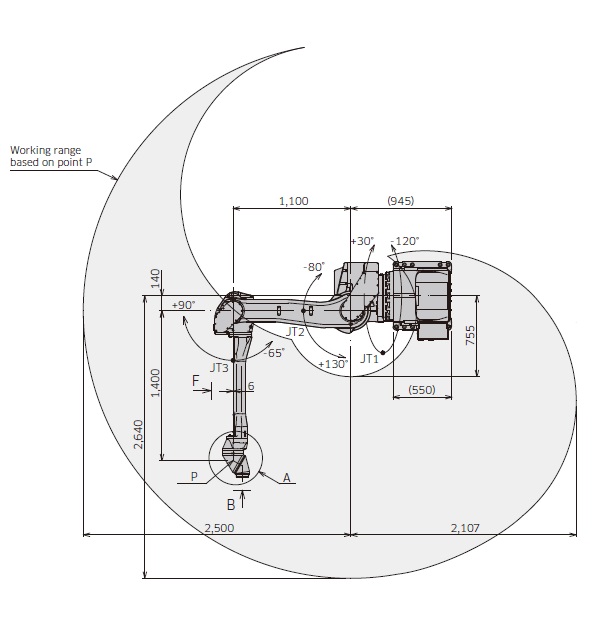
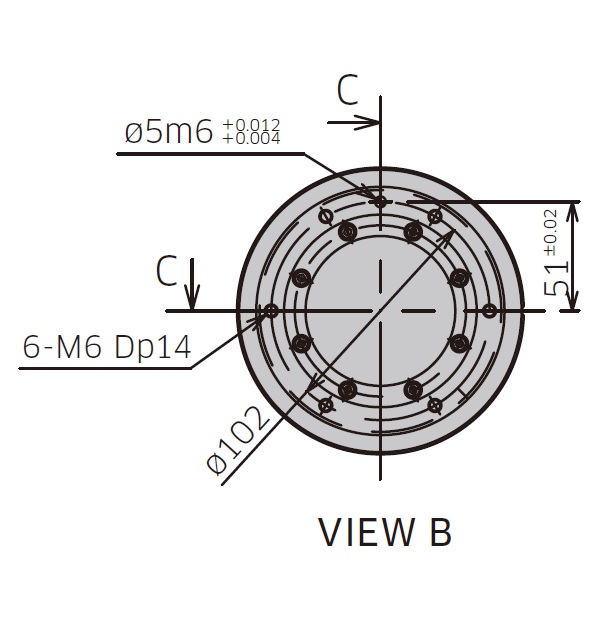
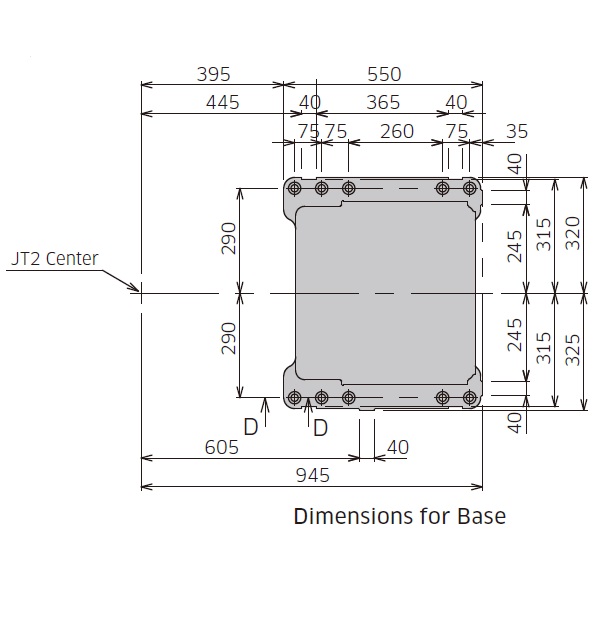
BEWEGUNGSRADIUS & ABMESSUNGEN
Klicken Sie zur Ansicht auf die Zeichnungen unten. Angegebene Maße sind in mm.
KJ264 Wand SPEZIFIKATIONEN
| KJ264 Wand SPEZIFIKATIONEN | |||
| Typ | Gelenkarmroboter | ||
|---|---|---|---|
| Handgelenk | 3Rø70 ✽3 | ||
| Freiheitsgrade | 6 | ||
| Maximale Nutzlast (kg) | Handgelenk : 15 Arm : 25 | ||
| Maximale Reichweite (mm) ✽1 | 2640 | ||
| Positionswiederholgenauigkeit(mm) ✽2 | ±0,5 | ||
| Bewegungsbereich (°) | Arm Rotation (JT1) | ±120 | |
| Arm Raus-rein (JT2) | +130 - –80 | ||
| Arm Auf-ab (JT3) | +90 - –65 | ||
| Handgelenk Schwenken (JT4) | ±720 | ||
| Handgelenk Biegen (JT5) | ±720 | ||
| Handgelenk Drehen (JT6) | ±410 | ||
| Zulässiges Drehmoment (N•m) | Handgelenk Schwenken (JT4) | 56,2 | |
| Handgelenk Biegen (JT5) | 43,4 | ||
| Handgelenk Drehen (JT6) | 22,0 | ||
| Zulässiges Trägheitsmoment (kg•m2) | Handgelenk Schwenken (JT4) | 2,19 | |
| Handgelenk Biegen (JT5) | 1,31 | ||
| Handgelenk Drehen (JT6) | 0,33 | ||
| Maximale Geschwindigkeit (m/s) | 1,5 | ||
| Gewicht (kg) | 530 | ||
| Installation | Wand | ||
| Umgebungsbedingungen | Umgebungstemperatur (°C) | 0 - 40 | |
| Relative Luftfeuchtigkeit (%) | 35 - 85 (nicht geschützt gegen Tauwasser und Frost) | ||
| Strombedarf (kVA) | 5 | ||
| Controller | Amerika | E35 | |
| Europa | E45 | ||
| Japan & Asien | E25 | ||
| Explosionsschutz | Amerika | Kombination aus Drucktyp und Eigensicherheitstyp (CL I ZN 1 AEx ib pxb ⅡB T4 / AEx ib IIB T4 Gb) | |
| Kanada | Kombination aus Drucktyp und Eigensicherheitstyp (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4 Gb) | ||
| Europa | Kombination aus Drucktyp und Eigensicherheitstyp (Ⅱ2 G Ex pxb ib ⅡB T4 / Ex ib IIB T4 Gb) | ||
| Korea | Kombination aus Drucktyp und Eigensicherheitstyp (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4) | ||
| China | Kombination aus Drucktyp und Eigensicherheitstyp (Ex ib px ⅡB T4 Gb / Ex ib IIB T4 Gb) | ||
| Japan und Asien (außer China und Korea) | Kombination aus Drucktyp und Eigensicherheitstyp (fG4 / Ex ib IIB T4 Gb) | ||
✽1: Das 3R (Roll Roll Roll) Handgelenk der 6-Achs-Roboter umfasst den Abstand von der Mitte der Achse 1 bis zum Schnittpunkt der Achse 4 und 5.
✽2: Die Abbildung entspricht ISO9283.
✽3: Schlauch eingebaut möglich.
Kontakt

-
Klicken Sie hier oder rufen Sie
+49 2131 3426-0 an(Mo. – Fr. 9:00 - 17:00 MEZ)
Teilen




