




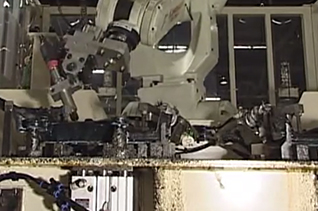

Maschinenbeladung von Teilen hydraulischer Motoren
Ein Kawasaki RS080N nimmt Teile von Hydraulikmotoren aus einem Drahtkorb auf und positioniert diese auf einen Rollenförderer zur Beladung einer Bearbeitungsmaschine. Mittels eines Vakuumgreifers am Roboterarm wird der Lagentrenner entfernt. Die Bilderkennungssoftware erkennt die Lage der Werkstücke und sendet diese an den Controller des Roboters. Der Roboter nimmt die Werkstücke auf und lädt diese auf den Rollenförderer der Bearbeitungsmaschine. Mittels dieser Automatisierung wurde die Flexibilität der Bearbeitungsmaschine deutlich erhöht.
Teilen




