





BX100S Roboter
OPTIMIERTE ROBOTER FÜR DEN KAROSSERIEBAU
Die Roboter der B Serie für den Karosseriebau wurden mit Hilfe Kawasakis bewährter fortschrittlicher Technologie und extensiver Erfahrung im Fahrzeugbau entwickelt, um Leistung auf ein neues Niveau zu bringen. Das robuste und gleichzeitig schlanke Design erzielt die begehrte Optimierung von Funktionalität, Flexibilität und Investmenteffizienz für maximale Effektivität im Punktschweißen und vielseitige Einsetzbarkeit.
BX100S Roboter Übersicht:
Maximale Nutzlast 100 kg
Maximale Reichweite 1634 mm

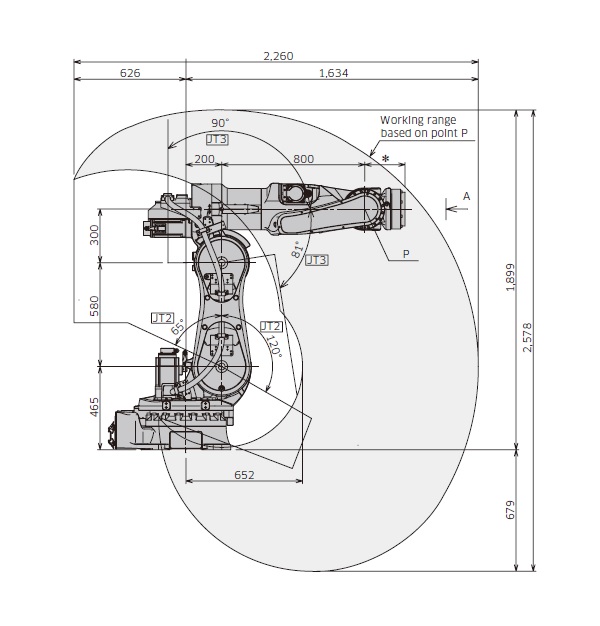
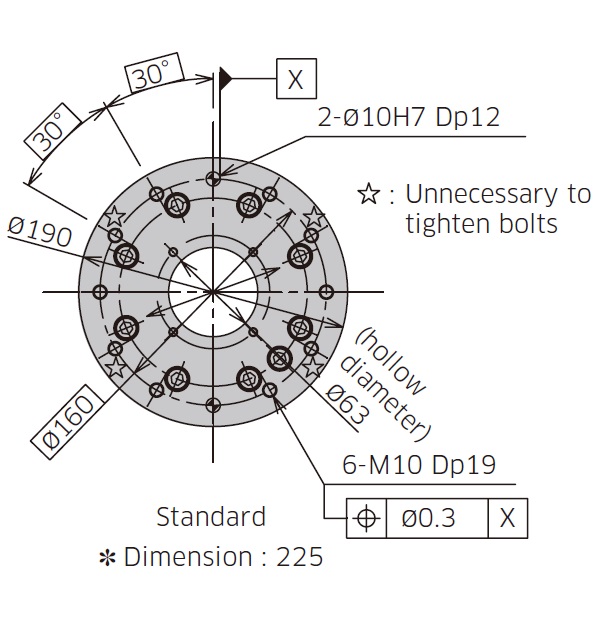
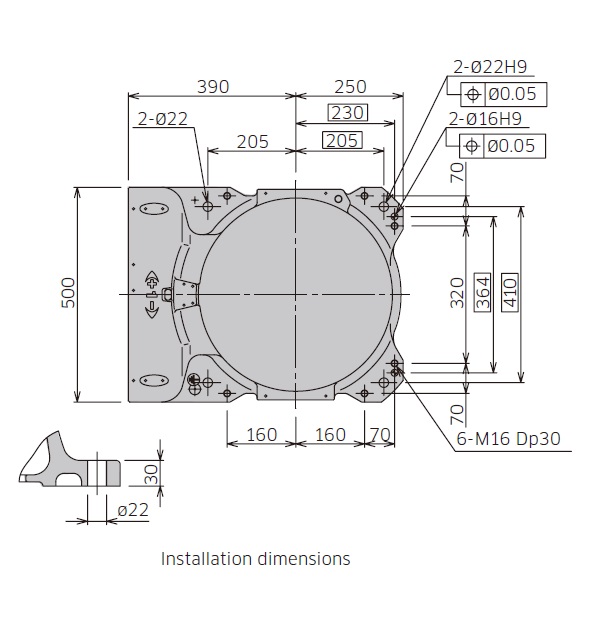
BEWEGUNGSRADIUS & ABMESSUNGEN
Klicken Sie zur Ansicht auf die Zeichnungen unten. Angegebene Maße sind in mm.
BX100S Roboter SPEZIFIKATIONEN
| BX100S SPEZIFIKATIONEN | |||
| Typ | Gelenkarmroboter | ||
|---|---|---|---|
| Freiheitsgrade | 6 | ||
| Maximale Nutzlast (kg) | 100 | ||
| Maximale Reichweite (mm) | 1634 | ||
| Positionswiederholgenauigkeit(mm) ✽1 | ±0,06 | ||
| Bewegungsbereich (°) | Arm Rotation (JT1) | ±160 | |
| Arm Raus-rein (JT2) | +120 - −65 | ||
| Arm Auf-ab (JT3) | +90 - −81 | ||
| Handgelenk Schwenken (JT4) | ±210 | ||
| Handgelenk Biegen (JT5) | ±125 | ||
| Handgelenk Drehen (JT6) | ±210 | ||
| Maximale Geschwindigkeit (°/s) | Arm Rotation (JT1) | 135 | |
| Arm Raus-rein (JT2) | 125 | ||
| Arm Auf-ab (JT3) | 155 | ||
| Handgelenk Schwenken (JT4) | 200 | ||
| Handgelenk Biegen (JT5) | 160 | ||
| Handgelenk Drehen (JT6) | 300 | ||
| Zulässiges Drehmoment (N•m) | Handgelenk Schwenken (JT4) | 830 | |
| Handgelenk Biegen (JT5) | 830 | ||
| Handgelenk Drehen (JT6) | 441 | ||
| Zulässiges Trägheitsmoment (kg•m2) | Handgelenk Schwenken (JT4) | 85 | |
| Handgelenk Biegen (JT5) | 85 | ||
| Handgelenk Drehen (JT6) | 45 | ||
| Gewicht (kg) | 720 | ||
| Installation | Boden | ||
| Umgebungsbedingungen | Umgebungstemperatur (°C) | 0 - 45 | |
| Relative Luftfeuchtigkeit (%) | 35 - 85 (nicht geschützt gegen Tauwasser und Frost) | ||
| Controller / Strombedarf (kVA) | E02 / 7.5 | ||
| Schutzart | Handgelenk: IP67 Äquivalent / Basis: IP65 Äquivalent | ||
✽1: Die Abbildung entspricht ISO9283.
Kontakt

-
Klicken Sie hier oder rufen Sie
+49 2131 3426-0 an(Mo. – Fr. 9:00 - 17:00 MEZ)
Teilen




