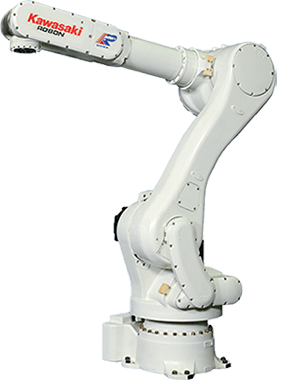
RD080N 가반중량80 Kg최대 리치2100 mm로봇 카테고리팔렛타이징 로봇설치 방식바닥식시리즈RD 시리즈 파워와 스피드 어느 쪽의 요구에도 대응 가능한 가와사키의 고속 팰리타이징 로봇. 식품, 약품, 인쇄물 등......여러 업계가 고객님의 다양한 요구에 대응하기 위해 생산의 다품종 소량화를 추진하고 있습니다. 적용분야팔렛타이징지원되는 컨트롤러F03, E03 데이터 다운로드 카탈로그 다운로드 CAD (STEP) 다운로드 캐드(DXF) 다운로드 표준사양서 다운로드 설치접속매뉴얼 다운로드 ※CAD데이터를 이용할 경우, 이곳의주의사항을 반드시 확인하시기 바랍니다.
※CAD데이터를 이용할 경우, 이곳의주의사항을 반드시 확인하시기 바랍니다.