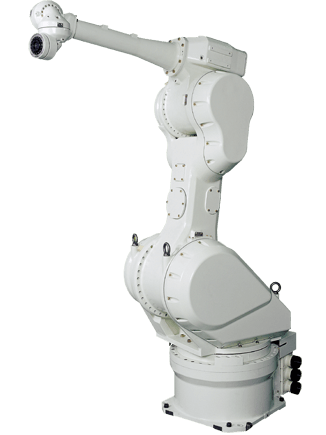
KF192 가반중량12 Kg최대 리치1973 mm로봇 카테고리방폭 도장 로봇설치 방식바닥식, 벽걸이식시리즈K 시리즈 K 시리즈는 작은 버튼에서 큰 건설기계까지 모든 도장공정에 딱 맞는 머니퓰레이터를 라인 업했습니다. 적용분야도장지원되는 컨트롤러E25(일본·아시아) / E35(미주) / E45(유럽) 데이터 다운로드 카탈로그 다운로드 CAD (STEP) 다운로드 캐드(DXF) 다운로드 설치접속매뉴얼 다운로드 ※CAD데이터를 이용할 경우, 이곳의주의사항을 반드시 확인하시기 바랍니다.
※CAD데이터를 이용할 경우, 이곳의주의사항을 반드시 확인하시기 바랍니다.