ZX200S
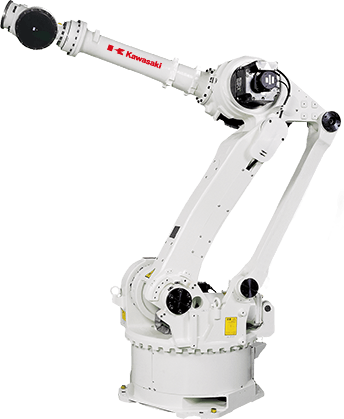
넓은 동작범위, 스폿 용접에서 핸들링까지 다양한 용도에 대응하는 대형 범용 로봇
신청 영상

CNC Machine, Deburring Machine & Acid Washing Machine Tending
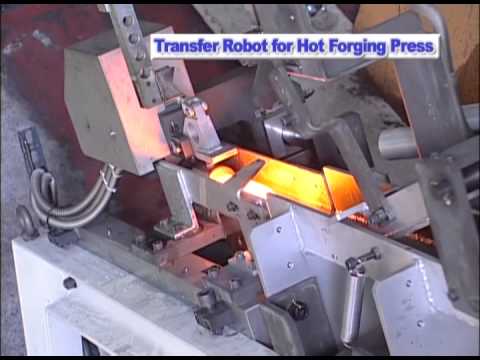
Transfering Hot Billets to Forging Press

Plasma Cutting & Spot Welding of Railcar Side Sill

Arc Welding Auger & Enclosure

Tunnel Inspection

Wood Routing & Cutting System
※CAD데이터를 이용할 경우, 이곳의주의사항을 반드시 확인하시기 바랍니다.