産業用ロボットは米国生まれの日本育ち?
日本で初めて産業用ロボットが誕生したのは、もう半世紀も前の話です。1968年、米国のベンチャー企業・ユニメーション社と技術導入契約を結んだ川崎重工は、国産化に着手。1969年に、国産第1号の「川崎ユニメート2000型」を完成させました。
これ以降、日本の産業用ロボットは、自動車産業を中心に、開発が加速。大きな世界シェアを獲得する一大産業に成長し、現在の「ロボット大国」の礎を築きました。産業用ロボットは、「米国生まれの日本育ち」と言えるかもしれません。
産業用ロボットは大きく分けると6種
産業用ロボットは、自動車産業だけでなく、電子・電気産業や食品産業など、幅広い分野で活用されています。それぞれの現場で、溶接、塗装、組み立て、仕分け、運搬など、幅広い使われ方をしており、そうした作業に対応すべく、製品として非常に多くの種類が用意されています。
これだけ様々な分野で活用されている産業用ロボットですが、実は大きく6種類に分類されることをご存じでしょうか。ここでは、その産業用ロボットの「種類」について紹介していきます。
分類のポイントは「関節の種類と構造」
産業用ロボットの分類方法は作業種類別、産業分野別、サイズ別など様々ですが、ここでは「関節の種類と構造」に注目してみましょう。
ロボットの「関節」は、人体の関節とよく似ていますが、異なる部分もあります。ロボットの場合、関節の駆動にはモーターが使われることが一般的です。関節の形態は、人間の肘は手首と同じように動く回転関節と、上下・前後・左右に伸縮することで動く直動関節があります。
「人間の関節」はロボットでいうと「軸」
人間の腕は伸び縮みしないので、関節と呼ぶにはちょっと違和感があるかもしれませんが、ロボットの場合は、回転関節も直動関節も1つの関節としてカウントします。関節の数は「軸」や「自由度」という単位で表し、たとえば関節が5つのロボットは「5軸」「5自由度」と言うことができます。関節の数はロボットを知るうえでの1つのポイントになります。
ロボットの先端には、物を掴むためのハンドや、作業に使う工具などが装着されます。ロボットは、この先端部の位置を移動させることで様々な作業を行いますが、この世界は3次元なので、先端部を空間上の任意の位置に運ぶためには、3つ以上の関節が必要です。さらに、先端の角度まで考慮すれば、最低でも6つの関節が必要になります。
複数の関節をどのように配置するか。これにより、ロボットの種類は以下の6つに分けることができます。
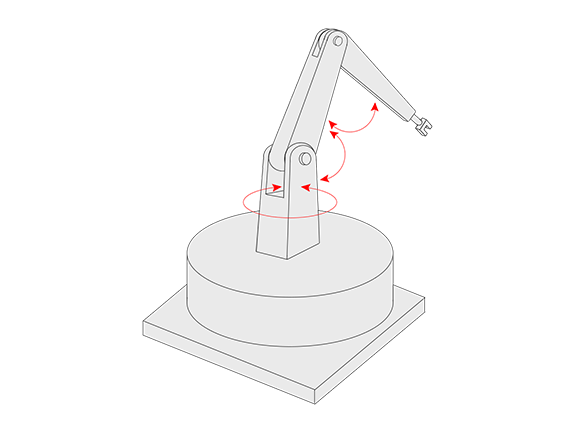
産業用ロボットの元祖は「極座標型ロボット」
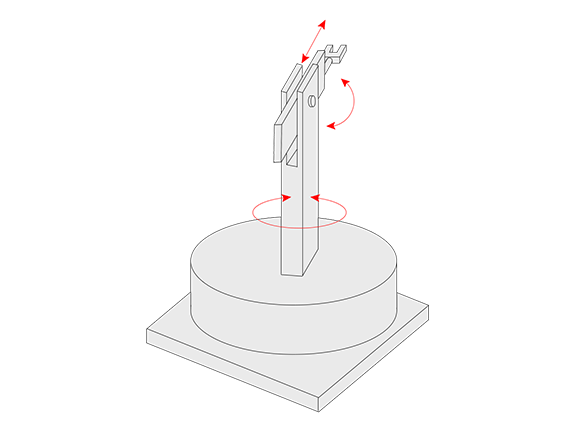
砲台のように中心に旋回軸があり、作業を行うアームは上下回転と伸縮が可能なロボットです。ロボットの周りの広い範囲に先端が届くよう考えられており、産業用ロボットの初期に広く普及しました。冒頭で述べた川崎ユニメート2000型もこのタイプです。
こちらは国産第1号の産業用ロボット、川崎ユニメート2000型が実際に動いている当時の貴重な動画です。
50年の長い伝統を持つ「円筒座標型ロボット」
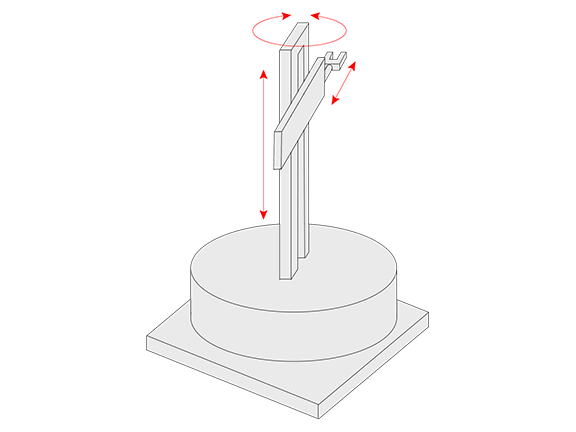
旋回軸を持ち、アームが伸縮するところは極座標型と似ていますが、こちらのアームは上下回転ではなく上下方向に移動するロボットです。特徴は極座標型とほぼ同じで、こちらも初期に多くのロボットで採用されていました。現在でも、液晶パネルの搬送などに利用されています。

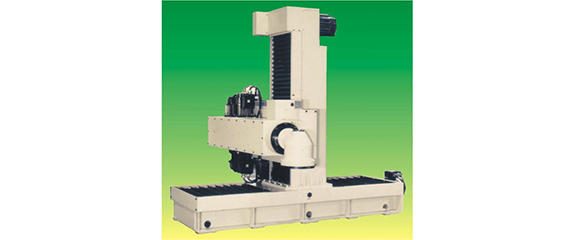
制御がシンプルな「直角座標型ロボット」
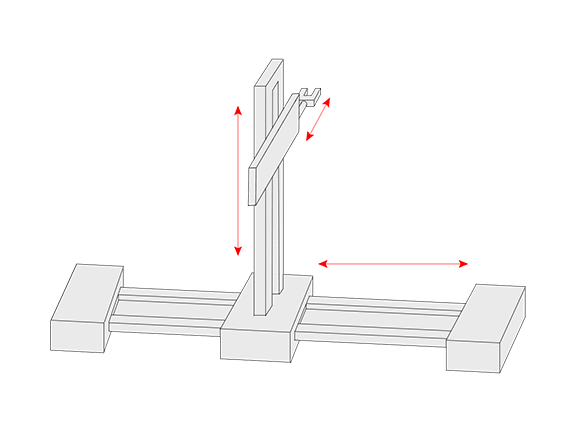
3次元の動きを回転ではなく、縦、横、高さという3方向の直交するスライドのみで実現するロボットです。動きとしては、ゲームセンターにあるクレーンゲームを想像すると分かりやすいでしょう。作業範囲に対し、設置面積が大きくなりがちですが、精度が高く、制御が簡単という特徴があります。重量物の搬送などに利用されています。
どんな動きも可能な「垂直多関節型ロボット」
現在、最も普及しているタイプの産業用ロボットです。垂直多関節型は、人間の腕の構造に近いスタイルのロボット。動きの自由度が非常に高く、回り込んでの作業も得意ですが、制御はやや複雑になります。自動車の溶接など、様々な用途で使われています。
こちらは、自動車のボディの溶接とバイクのフレームの溶接作業を、垂直多関節ロボットが行っている動画です。
組立が得意な「水平多関節型(スカラ型)ロボット」
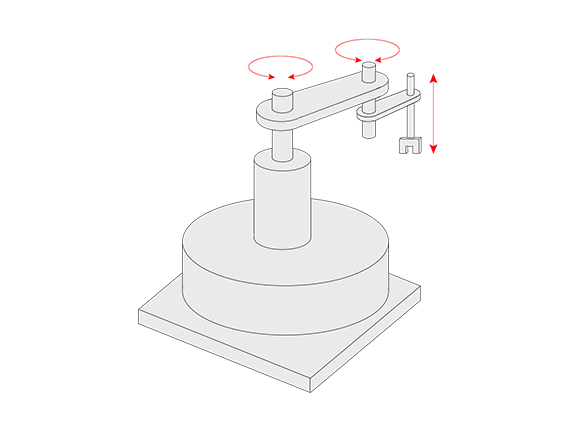
水平方向の動きに特化したロボットです。関節の回転軸が全て垂直に揃っているため、アームの先端は必ず水平面内を移動。高速に移動して平面上の位置を決めてから、先端部を上下に動かす仕組みになっており、平面的な作業に向いています。半導体ウエハの搬送や、基板の組み立てなどで幅広く利用されています。
こちらは川崎重工の双腕スカラロボットduAroが、両腕を使ってプリント基盤にパーツを組み立てていく動画です。
とにかく早く動ける「パラレルリンク型」
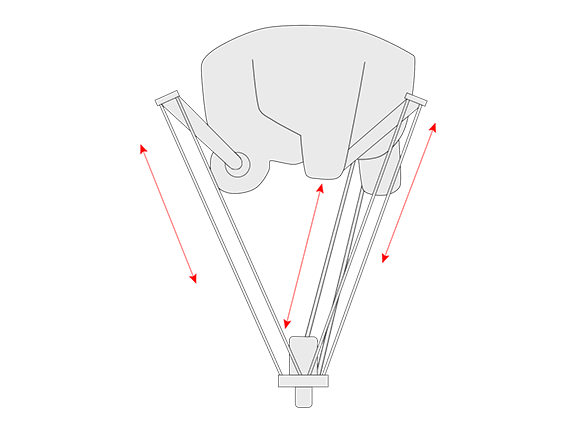
前述の多関節型は関節が直列(シリアル)に繋がったタイプでしたが、パラレルリンク型は並列(パラレル)に配置されたロボットです。一般的には、3本のアームで先端部の位置を制御する方式が多く、ベルトコンベアで流れてくる食品の整列や選定などに利用されます。可動範囲はやや狭いものの、各関節が直接、先端を制御するため、非常に高速に動けるという特徴があります。
こちらは川崎重工のパラレルリンクロボットYF03Nが、シソの葉をサイズ別に素早く並べていく動画です。
お伝えしたのはロボットができる作業のほんの一部ですが、このようにロボットの種類によって得意な動きや作業があるのがお分かりいただけたでしょうか。
適切なロボットを選択することが重要
このように、一口に産業用ロボットと言っても、関節の種類と構造により、可動範囲、精度、速度などの特性が異なり、それぞれに得意な作業があります。自動化したい作業にはどのタイプが適しているのか、産業用ロボットを導入する際には、事前によく検討することがとても重要です。