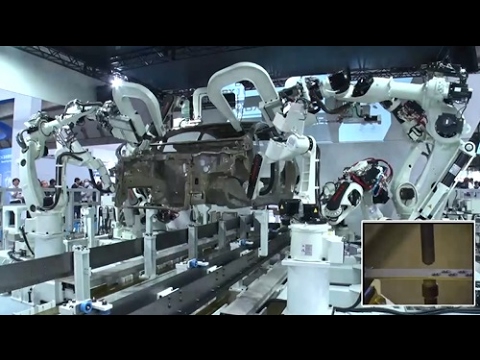
BX200X 最大可搬質量200 Kg最大リーチ3412 mmロボットカテゴリ大型汎用ロボット(可搬質量300kg以下)設置方式床置きロボットシリーズBX/BTシリーズ スポット溶接やハンドリングに適した大型汎用の高速ロボット。 ケーブル・ホース内蔵ができる中空手首アーム。 BXシリーズ中、最も長い3,412mmのリーチがあり、可動範囲が大きい。 適用用途組立、ハンドリング、スポット溶接対応コントローラF02、E02 資料ダウンロード カタログ ダウンロード CAD (STEP) ダウンロード CAD (DXF) ダウンロード 標準仕様書 ダウンロード 据付·接続要領書 ダウンロード ※CADデータをご利用頂く際は、こちらの注意事項を必ずご確認ください。※保証期間と保証内容については、こちらをご参照ください。 適用動画 車体組み立て 自動車ボディのスポット溶接


※CADデータをご利用頂く際は、こちらの注意事項を必ずご確認ください。
※保証期間と保証内容については、こちらをご参照ください。