BX300L
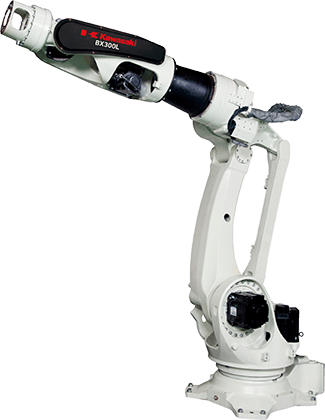
Flexible, Heavy Duty Robot
The BX300L features a hollow wrist for housing cables and hoses. The robust, yet lightweight arm design provides functionality, flexibility and efficiency for maximum spot welding effectiveness and multiple-purpose usage.
Application Video
Car Body Assembly at iREX2015 - Kawasaki CX210L, BX300L, BX100S & BA006N robots

Auto Body Assembly & Spot Welding
※ Before using CAD data, please be sure to read disclaimer here.