





BU015N Robot
The compact arm has a hollow part to accommodate cables and hoses inside the wrist, upper arm and base part.
It eliminates interference with peripheral equipment and makes offline programming significantly efficient.
It eliminates interference with peripheral equipment and makes offline programming significantly efficient.
BU015N Overview:
Payload 15 kg
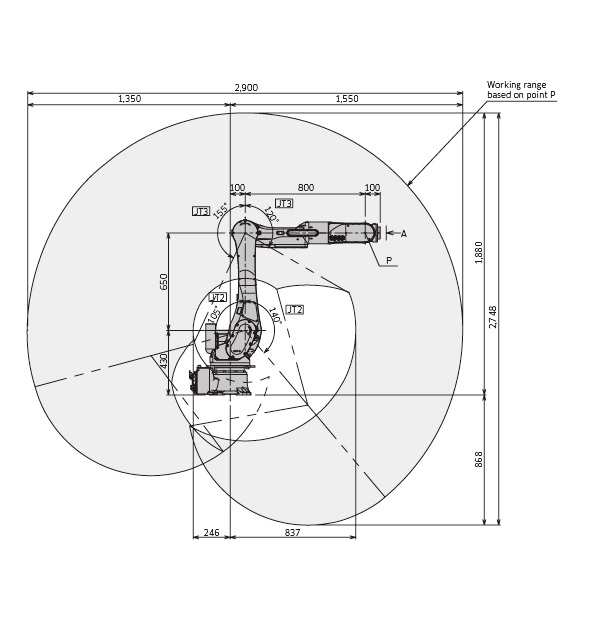
Max.Reach 1,550 mm
Applications:

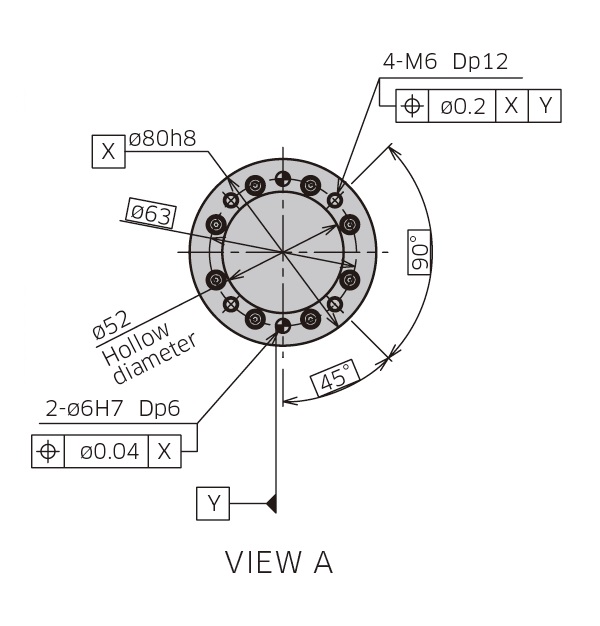
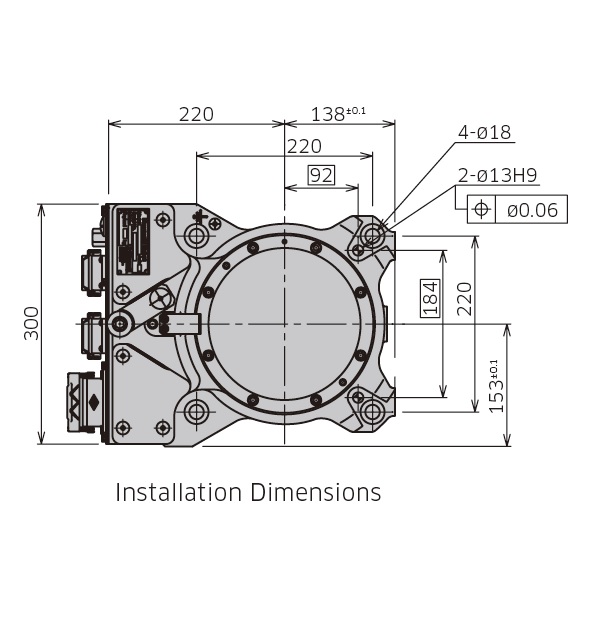
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).
BU015N SPECIFICATIONS
| BU015N | |||
| Type | Articulated | ||
|---|---|---|---|
| Degree of freedom (axes) | 6 | ||
| Payload (kg) | 15 | ||
| Max. reach (mm) | 1,550 | ||
| Position repeatability (mm)*1 | ±0.04 | ||
| Motion range (°) |
Arm Rotation (JT1) | ±180 | |
| Arm Out-in (JT2) | +140 - –105 | ||
| Arm Up-down (JT3) | +155 - –120 | ||
| Wrist Swivel (JT4) | ±210 | ||
| Wrist Bend 1 (JT7) | - | ||
| Wrist Bend 2 (JT5) | ±120 | ||
| Wrist Twist (JT6) | ±360 | ||
| Max. Speed (°/s) | Arm Rotation (JT1) | 250 | |
| Arm Out-in (JT2) | 250 | ||
| Arm Up-down (JT3) | 215 | ||
| Wrist Swivel (JT4) | 280 | ||
| Wrist Bend 1 (JT7) | - | ||
| Wrist Bend 2 (JT5) | 280 | ||
| Wrist Twist (JT6) | 360 | ||
| Max. Torque (N・m) | Wrist Swivel (JT4) | 27.0 | |
| Wrist Bend (JT5) | 27.0 | ||
| Wrist Twist (JT6) | 22.0 | ||
| Allowable Moment of inertia(kg・㎡)*2 | Wrist Swivel (JT4) | 0.70 | |
| Wrist Bend (JT5) | 0.70 | ||
| Wrist Twist (JT6) | 0.25 | ||
| Mass (kg) | 160 | ||
| Mounting | Floor | ||
| Installation environment | Ambient Tempreture (℃) | 0 - 45 | |
| Relative humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Controller / Power Requirements (kVA) | E51 / 5.6 | ||
| Option | Mechanical stopper JT1 | ||
| Traverse unit | |||
| Riser (600mmH, 300mmH) | |||
| Base plate (750mm x 750mm) | |||
| Please contact Kawasaki salesperson for other items. | |||
*1: Conforms to ISO9283.
*2: Represents allowable moment of inertia when allowable maximum torque is Loaded to each wrist axes.
Contact

-
Click here or call (855) 855-1414
Share




