KJ264
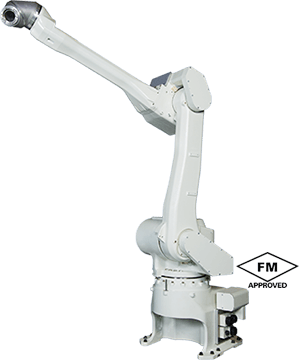
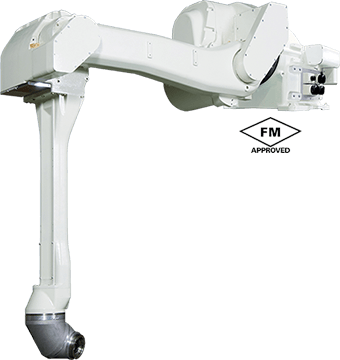
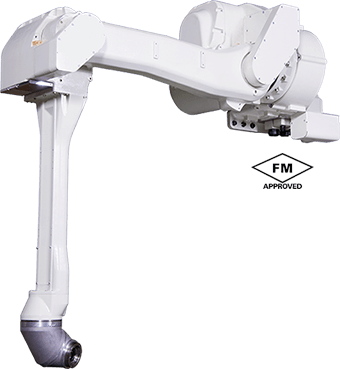
The floor mounting KJ264 explosion-proof painting robot features a 3R (Roll, Roll, Roll) hollow wrist with inner diameter of 70 mm inner to accommodate hoses as well as a slim and lightweight body with a wide motion range. Painting equipment can be easily mounted on the upper arm.
※ Before using CAD data, please be sure to read disclaimer here.