





KF121 Robot
EXPLOSION-PROOF PAINTING ROBOT
The KF121 painting robot is the smallest of the K series and is suitable for painting and handling small workpieces in an explosion-proof environment.
KF121 Overview:
Payload 5 kg
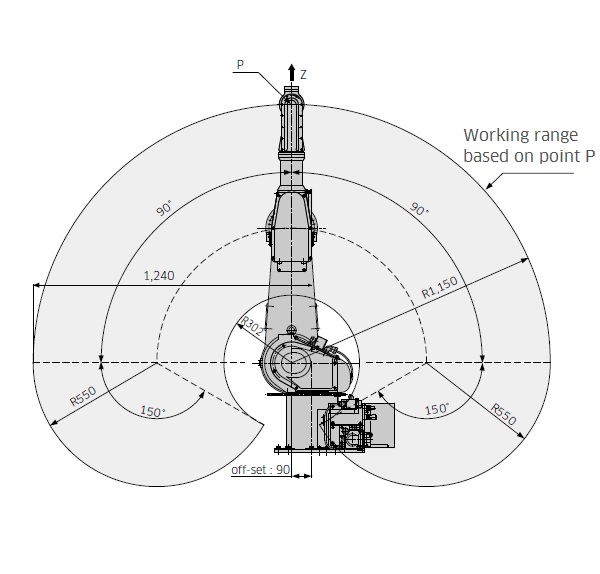
Max.Reach 1,240 mm
Applications:

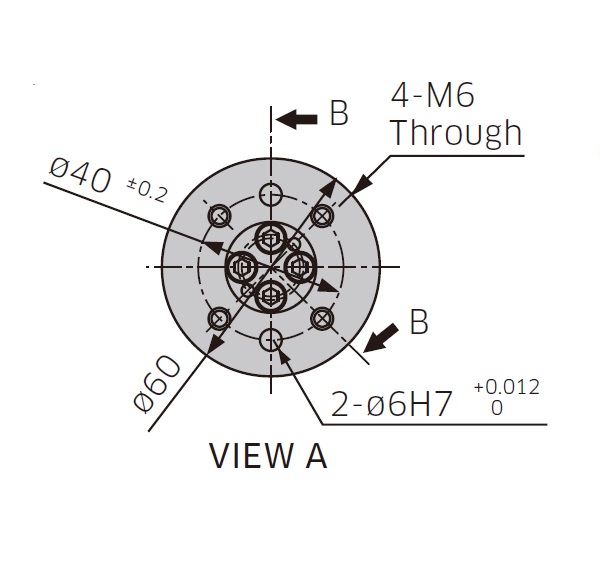
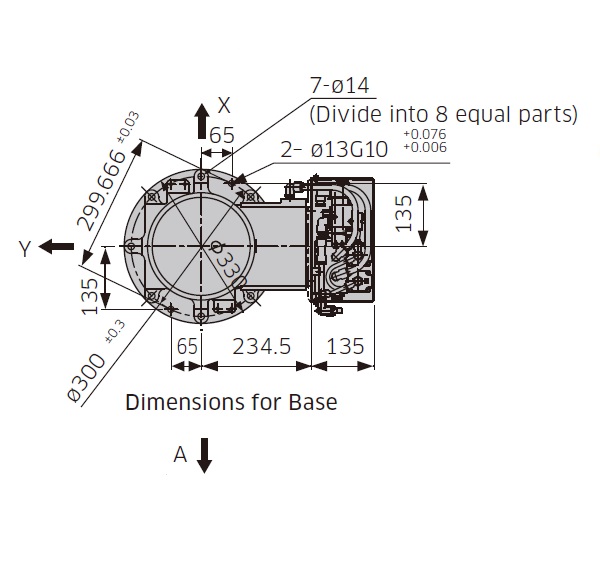
MOTION RANGE & DIMENSIONS
Click on the drawings below to view. Dimensions shown are in (mm).
KF121 SPECIFICATIONS
| KF121 SPECIFICATIONS | |||
| Type | Articulated Robot | ||
|---|---|---|---|
| Wrist Type | RBR | ||
| Degrees of Freedom (axes) | 6 | ||
| Payload (kg) | 5 | ||
| Max. Reach (mm) ✽1 | 1,240 | ||
| Positional Repeatability (mm) ✽2 | ±0.2 | ||
| Motion Range (°) | Arm Rotation (JT1) | ±160 ✽3 | |
| Arm Out-in (JT2) | ±90 | ||
| Arm Up-down (JT3) | ±150 | ||
| Wrist Swivel (JT4) | ±270 | ||
| Wrist Bend (JT5) | ±145 | ||
| Wrist Twist (JT6) | ±360 | ||
| Allowable Moment (N•m) | Wrist Swivel (JT4) | 7.8 | |
| Wrist Bend (JT5) | 7.8 | ||
| Wrist Twist (JT6) | 2.9 | ||
| Allowable Moment of Inertia (kg•m2) | Wrist Swivel (JT4) | 0.17 | |
| Wrist Bend (JT5) | 0.17 | ||
| Wrist Twist (JT6) | 0.06 | ||
| Mass (kg) | 140 | ||
| Mounting | Floor, Wall, Ceiling | ||
| Installation Environment | Ambient Temperature (°C) | 0 - 40 | |
| Relative Humidity (%) | 35 - 85 (No dew, nor frost allowed) | ||
| Power Requirements (kVA) ✽4 | 1.5 | ||
| Explosion-proof Construction | America | Combination of pressurized type and intrinsically safety type (CL I ZN 1 AEx ib pxb ⅡB T4 / AEx ib IIB T4 Gb) | |
| Canada | Combination of pressurized type and intrinsically safety type (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4 Gb) | ||
| Europe | Combination of pressurized type and intrinsically safety type (Ⅱ2 G Ex pxb ib ⅡB T4 / Ex ib IIB T4 Gb) | ||
| Korea | Combination of pressurized type and intrinsically safety type (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4) | ||
| China | Combination of pressurized type and intrinsically safety type (Ex ib px ⅡB T4 Gb / Ex ib IIB T4 Gb) | ||
| Japan & Asia (except Korea and China) | Combination of pressurized type and intrinsically safety type (Expxib ⅡB T4 / Ex ib IIB T4 Gb) | ||
| Controller | America | E37 | |
| Europe | E47 | ||
| Japan & Asia | E27 | ||
| Painting Speed (m/s) | - | ||
✽1: The RBR (Roll Bend Roll) wrist is the distance from JT1 to the axis cross-point between JT4 and JT5.
✽2: The figure conforms to ISO9283.
✽3: Wall : ±60
✽4: Depends on payload and motion patterns.
Contact

-
Click here





