MT400N
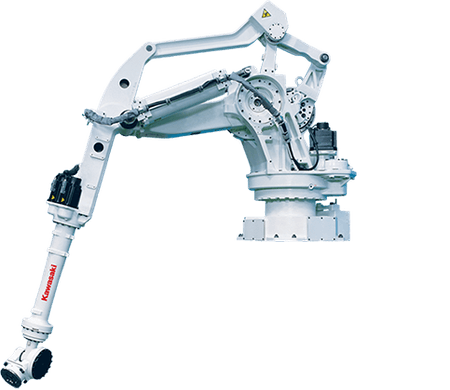
Innovative, High Payload, High Wrist Torque Robot
The shelf-mounted MT400N robot has a payload capacity of 400 kg, maximum horizontal reach of 3,503 mm and vertical reach of 4,319 mm, and was designed for vertical motion . Along with powerful motors, Kawasaki's original link design for JT3 (arm up-down) gives the robot the power to lift heavy loads without the use of bulky and limiting counterweights, maximizing the robot’s motion range and allowing for a compact footprint.
※ Before using CAD data, please be sure to read disclaimer here.