BA006N
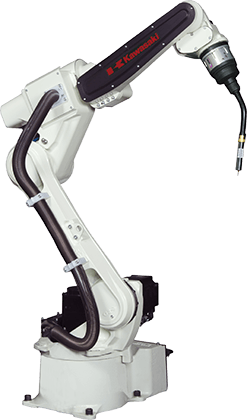
THROUGH-ARM CABLE ARC WELDING ROBOT
The BA006N is a small model of the BA Series arc welding robot.
The long reach (1,445mm), yet compact arm is best suited to arc welding of various workpieces.
Application Video
Car Body Assembly at iREX2015 - Kawasaki CX210L, BX300L, BX100S & BA006N robots
※Before using CAD data, please be sure to read disclaimer here.