





Vision Systems
Vision systems are used to identify, inspect, or locate an object.
Common applications that involve Kawasaki vision software include high-speed picking, quality inspection, and robot guidance. Kawasaki offers two PC vision software programs that work together to process an image, and distribute the results to multiple robots.
Common applications that involve Kawasaki vision software include high-speed picking, quality inspection, and robot guidance. Kawasaki offers two PC vision software programs that work together to process an image, and distribute the results to multiple robots.
KAWASAKI VISION SOFTWARE
K-VFinder and K-VAssist
Kawasaki's combination of K-VFinder and K-VAssist, along with 2D cameras and lighting, creates a high performance and flexible easy-to-use 2D vision system. K-VFinder is the recognition software that allows the user to configure pattern matching, binarization, and color recognition processes to locate and inspect objects. The user then configures the result to be distributed to up to eight robot controllers using K-VAssist through an Ethernet network.
VISION HARDWARE COMPATIBILITY
A variety of cameras are supported by the software including GigE, CameraLink, color, and greyscale cameras. Additionally, lighting hardware may be controlled through analog or discrete I/O from the robot controller.
The Kawasaki robot controller is also capable of communicating with third-party vision software for part identification, inspection or robot guidance with the built-in Ethernet TCP/IP or UDP communication. With the power and flexibility of AS Language programming, Kawasaki robots can communicate with most vision systems.
-
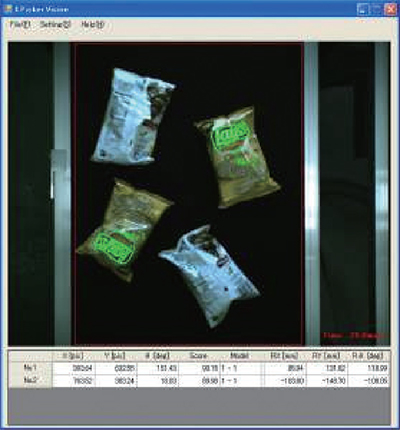
Workpiece recognition in K-VFINDER 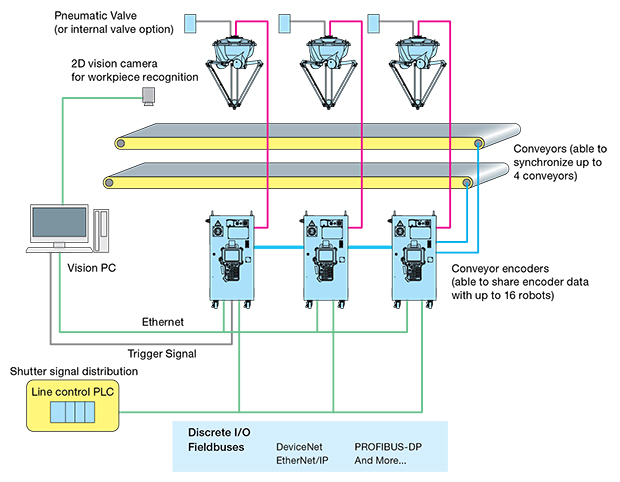
Configuration example of 2D vision system





